


加速度传感器是用来将加速度这一物理信号转变成便于丈量的电信号的测验仪器。它是工业、国防等许多范畴中进行冲击、振荡丈量常用的测验仪器。
1、加速度传感器原理概述
加速度传感器是用来将加速度这一物理信号转变成便于丈量的电信号的测验仪器。差容式力平衡加速度传感器则把被测的加速度转换为电容器的电容量改变。完成这种功用的办法有变空隙,变面积,变介电常量三种,差容式力平衡加速度传感器使用变空隙,且用差动式的结构,它长处是结构简略,动态呼应好,能完成无触摸式丈量,灵敏度好,分辨率强,能丈量0.01um乃至更细小的位移,可是因为自身的电容量一般很小,仅几pF至几百pF,其容抗可高达几MΩ至几百MΩ,所以对绝缘电阻的要求较高,并且寄生电容(引线电容及仪器中各元器件与极板间电容等)不行忽视。近年来因为广泛使用集成电路,使电子线路紧靠传感器的极板,使寄生电容,非线性等缺陷不断得到战胜。
差容式力平衡加速度传感器的机械部分紧靠电路板,把加速度的改变转变为电容中心极的位移改变,后续电路经过对位移的检测,输出一个对应的电压值,由此即能够求得加速度值。为确保传感器的正常作业。,加在电容两个极板的偏置电压有必要由过零比较器的输出方波电压来供给。
2、变空隙电容的根本作业原理
如式2-1所示是以空气为介质,两个平行金属板组成的平行板电容器,当不考虑边际电场影响时,它的电容量可用下式表明:
由式(2-1)可知,平板电容器的电容量是 、A、 的函数,假如将上极板固定,下极板与被测运动物体相连,当被测运动物体作上、下位移(即 改变)或左右位移(即A改变)时,将引起电容量的改变,经过丈量电路将这种电容改变转换为电压、电流、频率等电信号输出依据输出信号的巨细,即可测定物体位移的巨细,若把这种改变使用到电容式差容式力平衡传感器中,当有加速度信号时,就会引起电容改变 C,然后转换成电压信号输出,依据此电压信号即可计算出加速度的巨细。
由式(2-2)可知,极板间电容C与极板间间隔 是成反比的双曲线联系。因为这种传感器特性的非线性,所以作业时,一般动极片不能在整个空隙,规模内改变,而是约束在一个较小的 规模内,以使 与 C的联系近似于线性。
它阐明单位输入位移能引起输出电容相对改变的巨细,所以要进步灵敏度S应削减开始空隙 ,但这受电容器击穿电压的约束,并且添加安装加工的困难。
由式(2-5)能够看出,非线性将随相对位移添加面添加。因而,为了确保必定的线性,应约束极板的相对位移量,若增大开始空隙,又影响传感器的灵敏度,因而在实践使用中,为了进步灵敏度,减小非线性,大都选用差动式结构,在差动式电容传感器中,其间一个电容器C1的电容随位移 添加时,另一个电容器C2的电容则削减,它们的特性方程别离为:
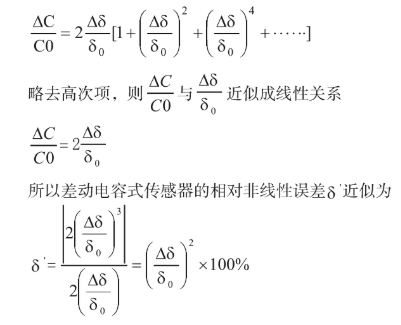

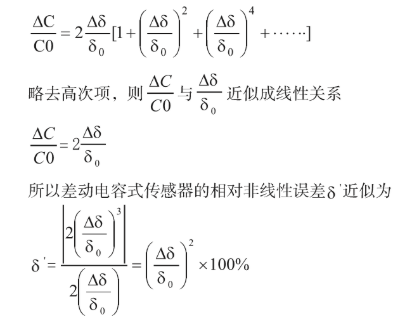
可见,电容式传感器做成差动式之后,非线性大大降低了,灵敏度进步一倍,与此一起,差动电容传感器还能减小静电引力丈量带来的影响,并有用地改进因为温度等环境影响所构成的差错。
3、电容式差容式力平衡传感器器的作业原理与结构
3.1作业原理
如图1所示,差容式力平衡加速度传感器原理框图
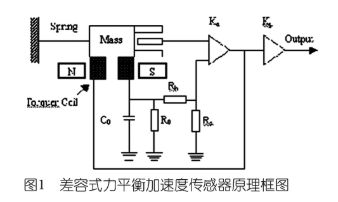
电路中除了所有必要的电容,电阻外,首要由正负电压调节器,四运放扩大器LT1058,双运放op270扩大器组成。
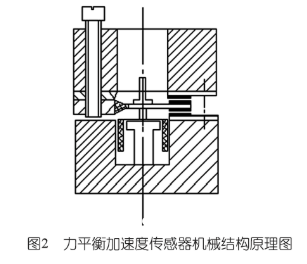
3.2差容式力平衡传感器机械结构原理
因为差动式电容,在变空隙使用中的灵敏度和线性度得到很大改进,所以得到广泛使用。如图2所示为一种差容式力平衡电容差容式力平衡传感器原理简图。首要由上、下磁钢,电磁铁,磁感应线圈,绷簧片,作电容中心极的质量块,覆铜的上下极板等部分组成。传感器上、下磁钢经过螺钉及绷簧相连,作为传感器的固定部分,上,下极板别离固定在上、下磁钢上。极板之间有一个用绷簧片支撑的质量块,并在此质量块上、下两旁边面堆积有金属(铜)电极,构成电容的活动极板。这样,上顶板与质量块的上旁边面构成电容C1,下底板与质量块下旁边面构成电容C2,绷簧片一端与磁钢相连,另一端与电容中心极相连,以操控其在一个有用的规模内振荡。由相应芯片输出的方波信号,经过零比较后输出方波,此方波经电容滤除其间的直流电压,构成对称的方波,该对称的方波加到电容的一个极板上,一起经一次反向后的对称波形加到另一个极板上。
当没有加速度信号时,中心极板处于上、下极板的中心方位C1=C2,△C=0后续电路没有输出;当有加速度信号时,中心极板(质量块)将违背中心方位,发生细小位移,传感器的固定部分也将有细小的位移,设加速度为正时,质量块与上顶板间隔减小,与下底板间隔增大,所以C1>C2,因而会发生一个电容的改变量△C,△C由扩大电路部分扩大,一起,将扩大电路的输出电流引进到反应网络。因为OP270的脚1和16别离与线圈两头相连,当有电流流过线圈时,将发生感应磁场,就会有电磁力发生。因为上、下磁钢之间有绷簧,所以在电磁力的效果下将使磁钢回到没有加速度时的方位,即此刻的电容改变彻底有加速度的改变引起,一起因为线圈与活动极板经过中心轴线相连,所以在电磁力的效果下,使中心极向发生加速度时的位移的相反的方向运动,即相当于在△C的扩大电路中引进了负反应,这样,使传感器的丈量规模大大进步。因而,关于任何加速度值,只需检测到组成电容改变量△C,便能使活动极板在两固定极板之间对应一个适宜的方位,此刻后续电路便输出一个与加速度成正比的电压,由此电压值就能够计算出加速度的巨细。
4、力平衡传感器实践使用
哈尔滨北奥振荡技能是专门从事振荡信号丈量的专业公司,它们使用这种差容式力平衡原理开宣布的力平衡加速度传感器完成的首要性能指标如下:
丈量规模:±2.0g,±0.125g,±0.055g
灵敏度:BA-02a:±2.5V/g、±40.0V/g
BA-02b1:±40.0V/g(差动输出)
BA-02b2:±90.0V/g(特定要求,高灵敏度)
频响规模:DC-50Hz(±1dB)
肯定精度:±3%FS
穿插搅扰:小于0.3%
线性度:优于1%
噪声:小于10μV
动态规模:大于120dB
温漂:小于0.01%g/g
电源:±12V-±15V @30.0mA
体积:Φ43x60mm
选用这种规划原理的传感器在振荡信号丈量范畴现已得到广泛使用,该种传感器特别合适地震、修建、军事、交通、机械、帆海等范畴的振荡丈量。
责任编辑:gt






