一、开发环境
主 机:VMWare–Fedora 9
开发板:Mini2440–64MB Nand, Kernel:2.6.30.4
编译器:arm-linux-gcc-4.3.2
二、条件常识
1、Linux输入子体系(Input Subsystem):
在Linux中,输入子体系是由输入子体系设备驱动层、输入子体系核心层(Input Core)和输入子体系工作处理层(Event Handler)组成。其间设备驱动层供给对硬件各寄存器的读写拜访和将底层硬件对用户输入拜访的呼应转化为标准的输入工作,再经过核心层提交给工作处理层;而核心层对下供给了设备驱动层的编程接口,对上又供给了工作处理层的编程接口;而工作处理层就为咱们用户空间的应用程序供给了一致拜访设备的接口和驱动层提交来的工作处理。所以这使得咱们输入设备的驱动部分不在用关怀对设备文件的操作,而是要关怀对各硬件寄存器的操作和提交的输入工作。下面用图形来描绘一下这三者的联系吧!
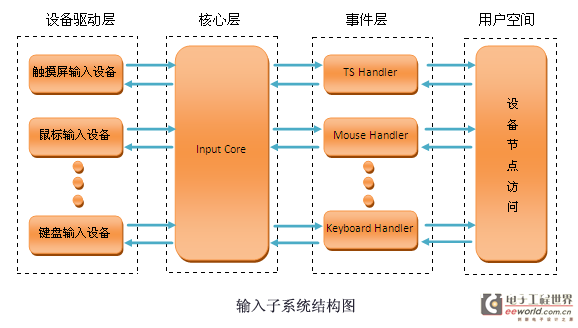
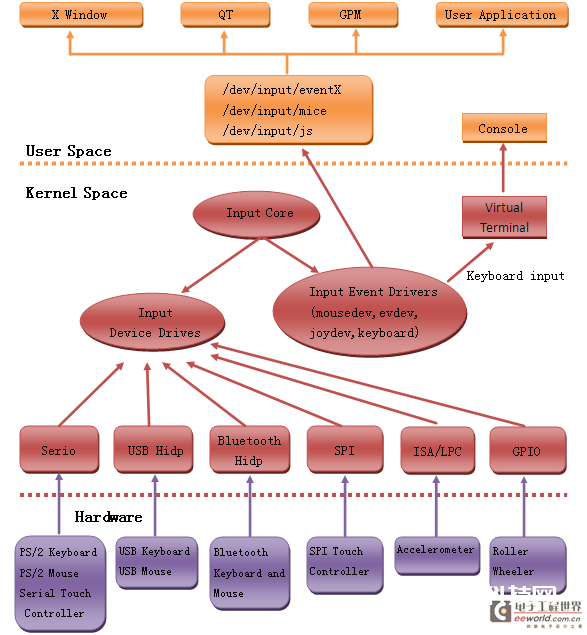
别的,又找了另一幅图来阐明Linux输入子体系的结构,或许愈加形象简单了解。如下:
2、输入子体系设备驱动层完成原理:
在Linux中,Input设备用input_dev结构体描绘,界说在input.h中。设备的驱动只需依照如下进程就可完成了。
①、在驱动模块加载函数中设置Input设备支撑input子体系的哪些工作;
②、将Input设备注册到input子体系中;
③、在Input设备发生输入操作时(如:键盘被按下/抬起、角度屏被角度/抬起/移动、鼠标被移动/单击/抬起时等),提交所发生的工作及对应的键值/坐标等状况。
Linux中输入设备的工作类型有(这儿只列出了常用的一些,更多请看linux/input.h中):
EV_SYN 0x00 同步工作
EV_KEY 0x01 按键工作
EV_REL 0x02 相对坐标(如:鼠标移动,陈述的是相对最终一次方位的偏移)
EV_ABS 0x03 肯定坐标(如:角度屏和操作杆,陈述的是肯定的坐标方位)
EV_MSC 0x04 其它
EV_LED 0x11 LED
EV_SND 0x12 声响
EV_REP 0x14 Repeat
EV_FF 0x15 力反馈
用于提交较常用的工作类型给输入子体系的函数有:
void input_report_key(struct input_dev *dev, unsigned int code, int value); //提交按键工作的函数
void input_report_rel(struct input_dev *dev, unsigned int code, int value); //提交相对坐标工作的函数
void input_report_abs(struct input_dev *dev, unsigned int code, int value); //提交肯定坐标工作的函数
留意,在提交输入设备的工作后必须用下列办法使工作同步,让它奉告input体系,设备驱动现已发出了一个完好的陈述:
void input_sync(struct input_dev *dev)
三、角度屏驱动的完成进程
1、硬件原理图剖析:
S3c2440芯片内部角度屏接口与ADC接口是集成在一起的,硬件结构原理图请看:S3C2440上ADC驱动实例开发解说中的图,其间通道7(XP或AIN7)作为角度屏接口的X坐标输入,通道5(YP或AIN5)作为角度屏接口的Y坐标输入。在”S3C2440上ADC驱动实例开发解说”中,AD转化的模拟信号是由开发板上的一个电位器发生并经过通道1(AIN0)输入的,而这儿的模拟信号则是由点触角度屏所发生的X坐标和Y坐标两个模拟信号,并别离经过通道7和通道5输入。S3c2440供给的角度屏接口有4种处理形式,别离是:正常转化形式、独自的X/Y方位转化形式、主动X/Y方位转化形式和等候中止形式,关于在每种形式下作业的要求,请具体检查数据手册的描绘。本驱动实例将选用主动X/Y方位转化形式和等候中止形式。
留意:在每步中,为了让代码逻辑愈加有条理和简单了解,就没有考虑代码的次序,比方函数要先界说后调用。假如要编译此代码,请严厉依照C言语的标准来调整代码的次序。
2、树立角度屏驱动程序my2440_ts.c,首要完成加载和卸载部分,在驱动加载部分,咱们首要做的工作是:启用ADC所需求的时钟、映射IO口、初始化寄存器、请求中止、初始化输入设备、将输入设备注册到输入子体系。代码如下:
view plainprint?
#include
#include
#include
#include
#include
#include
#include adc.h>
#include
#include
static struct clk *adc_clk;
static void __iomem *adc_base;
static struct input_dev *ts_dev;
#define DEVICE_NAME “my2440_TouchScreen”
#define WAIT4INT(x) (((x)<<8) | S3C2410_ADCTSC_YM_SEN | S3C2410_ADCTSC_YP_SEN | /
S3C2410_ADCTSC_XP_SEN | S3C2410_ADCTSC_XY_PST(3))
static int __init ts_init(void)
{
int ret;
adc_clk = clk_get(NULL, “adc”);
if(!adc_clk)
{
printk(KERN_ERR “falied to find adc clock source/n”);
return -ENOENT;
}
clk_enable(adc_clk);
adc_base = ioremap(S3C2410_PA_ADC, 0x20);
if(adc_base == NULL)
{
printk(KERN_ERR “failed to remap register block/n”);
ret = -EINVAL;
goto err_noclk;
}
adc_initialize();
ret = request_irq(IRQ_ADC, adc_irq, IRQF_SHARED | IRQF_SAMPLE_RANDOM, DEVICE_NAME, 1);
if(ret)
{
printk(KERN_ERR “IRQ%d error %d/n”, IRQ_ADC, ret);
ret = -EINVAL;
goto err_nomap;
}
ret = request_irq(IRQ_TC, tc_irq, IRQF_SAMPLE_RANDOM, DEVICE_NAME, 1);
if(ret)
{
printk(KERN_ERR “IRQ%d error %d/n”, IRQ_TC, ret);
ret = -EINVAL;
goto err_noirq;
}
ts_dev = input_allocate_device();
ts_dev->evbit[0] = BIT(EV_SYN) | BIT(EV_KEY) | BIT(EV_ABS);
ts_dev->keybit[BITS_TO_LONGS(BTN_TOUCH)] = BIT(BTN_TOUCH);
input_set_abs_params(ts_dev, ABS_X, 0, 0x3FF, 0, 0);
input_set_abs_params(ts_dev, ABS_Y, 0, 0x3FF, 0, 0);
input_set_abs_params(ts_dev, ABS_PRESSURE, 0, 1, 0, 0);
ts_dev->name = DEVICE_NAME;
ts_dev->id.bustype = BUS_RS232;
ts_dev->id.vendor = 0xDEAD;
ts_dev->id.product = 0xBEEF;
ts_dev->id.version = 0x0101;
input_register_device(ts_dev);
return 0;
err_noclk:
clk_disable(adc_clk);
clk_put(adc_clk);
err_nomap:
iounmap(adc_base);
err_noirq:
free_irq(IRQ_ADC, 1);
return ret;
}
static void adc_initialize(void)
{
writel(S3C2410_ADCCON_PRSCEN | S3C2410_ADCCON_PRSCVL(0xFF), adc_base + S3C2410_ADCCON);
writel(0xffff, adc_base + S3C2410_ADCDLY);
writel(WAIT4INT(0), adc_base + S3C2410_ADCTSC);
}
static void __exit ts_exit(void)
{
disable_irq(IRQ_ADC);
disable_irq(IRQ_TC);
free_irq(IRQ_ADC, 1);
free_irq(IRQ_TC, 1);
iounmap(adc_base);
if(adc_clk)
{
clk_disable(adc_clk);
clk_put(adc_clk);
adc_clk = NULL;
}
input_unregister_device(ts_dev);
}
module_init(ts_init);
module_exit(ts_exit);
MODULE_L%&&&&&%ENSE(“GPL”);
MODULE_AUTHOR(“Huang Gang”);
MODULE_DESCRIPTION(“My2440 Touch Screen Driver”);
3、接下来要做的是,在两个中止服务程序中完成角度屏状况和坐标的转化。先看代码,如下:
view plainprint?
extern struct semaphore ADC_LOCK;
static int OwnADC = 0;
static long xp;
static long yp;
static int count;
#define AUTOPST (S3C2410_ADCTSC_YM_SEN | S3C2410_ADCTSC_YP_SEN | S3C2410_ADCTSC_XP_SEN | /
S3C2410_ADCTSC_AUTO_PST | S3C2410_ADCTSC_XY_PST(0))
static irqreturn_t tc_irq(int irq, void *dev_id)
{
unsigned long data0;
unsigned long data1;
int updown;
if (down_trylock(&ADC_LOCK) == 0)
{
OwnADC = 1;
data0 = readl(adc_base + S3C2410_ADCDAT0);
data1 = readl(adc_base + S3C2410_ADCDAT1);
updown = (!(data0 & S3C2410_ADCDAT0_UPDOWN)) && (!(data1 & S3C2410_ADCDAT0_UPDOWN));
if (updown)
{
touch_timer_fire(0);
}
else
{
OwnADC = 0;
up(&ADC_LOCK);
}
}
return IRQ_HANDLED;
}
static void touch_timer_fire(unsigned long data)
{
unsigned long data0;
unsigned long data1;
int updown;
data0 = readl(adc_base + S3C2410_ADCDAT0);
data1 = readl(adc_base + S3C2410_ADCDAT1);
updown = (!(data0 & S3C2410_ADCDAT0_UPDOWN)) && (!(data1 & S3C2410_ADCDAT0_UPDOWN));
if (updown)
{
if (count != 0)
{
long tmp;
tmp = xp;
xp = yp;
yp = tmp;
xp >>= 2;
yp >>= 2;
#ifdef CONFIG_TOUCHSCREEN_MY2440_DEBUG
struct timeval tv;
do_gettimeofday(&tv);
printk(KERN_DEBUG “T: d, X: ld, Y: ld/n”, (int)tv.tv_usec, xp, yp);
#endif
input_report_abs(ts_dev, ABS_X, xp);
input_report_abs(ts_dev, ABS_Y, yp);
input_report_abs(ts_dev, ABS_PRESSURE, 1);
input_report_key(ts_dev, BTN_TOUCH, 1);
input_sync(ts_dev);
}
xp = 0;
yp = 0;
count = 0;
writel(S3C2410_ADCTSC_PULL_UP_DISABLE | AUTOPST, adc_base + S3C2410_ADCTSC);
writel(readl(adc_base + S3C2410_ADCCON) | S3C2410_ADCCON_ENABLE_START, adc_base + S3C2410_ADCCON);
}
else
{
count = 0;
input_report_key(ts_dev, BTN_TOUCH, 0);
input_report_abs(ts_dev, ABS_PRESSURE, 0);
input_sync(ts_dev);
writel(WAIT4INT(0), adc_base + S3C2410_ADCTSC);
if (OwnADC)
{
OwnADC = 0;
up(&ADC_LOCK);
}
}
}
static struct timer_list touch_timer = TIMER_INITIALIZER(touch_timer_fire, 0, 0);
static irqreturn_t adc_irq(int irq, void *dev_id)
{
unsigned long data0;
unsigned long data1;
if(OwnADC)
{
data0 = readl(adc_base + S3C2410_ADCDAT0);
data1 = readl(adc_base + S3C2410_ADCDAT1);
xp += data0 & S3C2410_ADCDAT0_XPDATA_MASK;
yp += data1 & S3C2410_ADCDAT1_YPDATA_MASK;
count++;
if (count < (1<<2))
{
writel(S3C2410_ADCTSC_PULL_UP_DISABLE | AUTOPST, adc_base + S3C2410_ADCTSC);
writel(readl(adc_base + S3C2410_ADCCON) | S3C2410_ADCCON_ENABLE_START, adc_base + S3C2410_ADCCON);
}
else
{
mod_timer(&touch_timer, jiffies + 1);
writel(WAIT4INT(1), adc_base + S3C2410_ADCTSC);
}
}
return IRQ_HANDLED;
}
咱们从全体上描绘转化这个的进程:
(1)假如角度屏感觉到角度,则触发角度屏中止即进入tc_irq,获取ADC_LOCK后判别角度屏状况为按下,则调用touch_timer_fire发动ADC转化;
(2)当ADC转化发动后,触发ADC中止即进入adc_irq,假如这一次转化的次数小于4,则从头发动ADC进行转化,假如4次结束后,发动1个时刻滴答的定时器,中止ADC转化,也就是说在这个时刻滴答内,ADC转化是中止的;
(3)这儿为什么要在1个时刻滴答到来之前中止ADC的转化呢?这是为了避免屏幕颤动。
(4)假如1个时刻滴答到来则进入定时器服务程序touch_timer_fire,判别角度屏依然处于按下状况则上报工作和转化的数据,并重启ADC转化,重复第(2)步;
(5)假如角度抬起了,则上报开释工作,并将角度屏从头设置为等候中止状况。
声明:本文内容来自网络转载或用户投稿,文章版权归原作者和原出处所有。文中观点,不代表本站立场。若有侵权请联系本站删除(kf@86ic.com)https://www.86ic.net/qianrushi/ruanjian/264514.html