张起浩,王建亮,蒋少国(南开大学 滨海学院,天津 300270)
摘 要:针对仿生人手的长途操控的研讨,规划了体感设备Leap Motion和依据STM32微操控器而规划的仿生人手相结合的人机交互体系。经过对三维改换矩阵的求解,验证了Leap Motion对空间中物体运动数据的捕捉原理。运用Leap Motion收集人体姿态,经过最新蓝牙5.0协议,将标识数据长途发送给STM32微操控器,再经过三极管的扩大操控舵机滚动指定视点,然后驱动仿生人手指运动,完成对物体的长途操控。最终规划试验,验证不同间隔对仿生人手指的灵敏度和稳定性的影响。在间隔5 m、10 m的阈值力、手指屈伸和呼应时刻都相同,但跟着间隔添加,灵敏度和稳定性越来越差,直至30 m时蓝牙接纳不到PC端传来的数据流。
关键词:Leap Motion;三维改换矩阵;蓝牙5.0
0 导言
跟着人工智能(artificial intelligence)的爆炸性开展,图像辨认变得越来越智能化,而且呈现了许多依据机器视觉原理的体感设备。本项目首要研讨leapmotion收集人手姿态动作,经过本地计算机对数据进行处理并辨认出多种手势后,长途与STM32板载蓝牙(Bluetooth 5.0)通讯 [1] ,STM32作为操控单元,依据不同指令操控仿生人手各关节的旋转视点,然后完成对物体的抓取等操控 [2] 。
1 Leap Motion体感操控器
1.1 Leap M otion的作业原理
Leap Motion是一种选用立体视觉原理,内部装备双摄像头如同人眼从不同视点捕捉画面,重建出来手掌在实在三维空间的运动信息并对空间物体进行坐标定位见图1。它能够辨认的规模大概在传感器上方的25 mm~600 mm,作业精度可到达0.01 mm,可完成高操作性。

1.2 Leap M otion数据捕捉
为了捕捉人手指关节在三维空间的方位和方向 [3] ,建立了右笛卡尔坐标系的3种运动数据:位移、旋转、缩放,需求经过人手运动模型或许投影法将笛卡儿三维空间数据映射出来才干得到人手关节视点信息 [5] ,并分别把X、Y、Z作为旋转轴(实际上仅在笔直坐标轴的平面上进行二维旋转),P在XY平面、XZ平面、YZ平面的投影分别为点M、点P、点N,三维旋转改换矩阵公式直接由二维旋转公式改变得来 [6] ,如图2。

1)绕Z轴旋转,相当于将 OP,在XY平面的投影OM环绕原点旋转, 如图3所示 , OM旋转θ角到OM′ 。

设旋转前的坐标为(x,y,z) 旋转后的坐标为( x',y',z′,)T, 则 的 坐 标 为 ( x,y)T,N′的 坐 标 为( x',y')T,由此可得:

关于x′和y′进行三角打开:

且有 z'=z;可得绕轴旋转 θ 角的旋转矩阵为:

2)绕轴旋转,相当于将 OP在平面的投影绕原点旋转,如图4,旋转 θ 角到ON′。

设旋转前的坐标为 (x,y,z) ,旋转后的坐标为( x',y',z′,)T, 则 的 坐 标 为 (z,y)T,N′的 坐 标 为( x',y′)T,由此可得:

关于z′和y′进行三角打开:

且有 x'=x;可得绕轴旋转 θ 角的旋转矩阵为:

3)绕轴旋转,相当于将 OP在平面的投影绕原点旋转,如图5所示,旋转 θ 角到OO′。

设旋转前的坐标为 ( x,y,z) ,旋转后的坐标为( x',y',z′)T, 则 的 坐 标 为 ( x,z)T,Q′的 坐 标 为( x',z′)T,由此可得:

关于x′和z′进行三角打开:

且有y'=y;可得绕Y轴旋转 θ 的旋转矩阵为:

4)绕X、Y、Z轴旋转的旋转矩阵分别为:

2 硬件电路规划
2.1 体系框图
该体系运用Leap Motion高辨认度与以Cortex-M3为内核的STM32等其他器材作为全体体系,见图6。该体系由Leap Motion、PC、STM32F103C8T6、信号扩大电路等组成。作业流程是Leap Motion传感器将收集到人体手势数据发送给PC端,PC端接纳数据流,并经过蓝牙5.0的协议透传给主STM32标识数据格式,STM32数据发送相应的操控指令,然后操控舵机的滚动视点。

2.2 ST M 32F103C 8T 6电路规划
STM32F103一款带有Cortex-M3内核的中低端32位Arm微操控器。最高CPU速度可到达72 MHz,1.25DMIPS/MHz,单周期乘法和硬件除法,本次试验挑选STM32F103C8T6芯片作为主控器,参加复位电路,添加电路运转的稳定性。
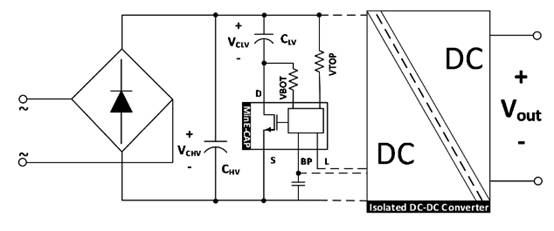
2.2.1 电源电路
该体系选用LMZ12003作为总电源办理芯片(如图7),12 V输入,5 V输出的形式,5 V输出首要为舵机供电。它是一种安定、安全、牢靠的规划,具有输入欠压确定、输出电压维护、短路维护、输出电流约束和使能偏置电压输出的功用。

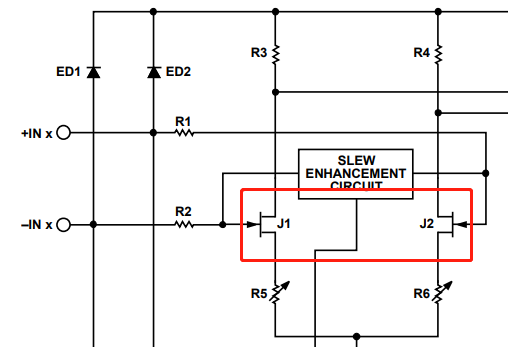
2.2.2 信号扩大电路
STM32微操控器的I/O口是弱电信号,不能直接驱动舵机的运动,因此有必要规划一个信号扩大电路进行扩大,故选用三极管2N3904。如图8所示。

2.3.3 蓝牙H C -42模块
该体系运用HC-42无线通讯模块进行仿生手的长途操控,蓝牙5.0的理论最大传输速度为24 Mbit/s(是之前蓝牙4.2版别的2倍)。传输到达无损耗水平,理论有用作业间隔可达300 m,是蓝牙4.2版别的4倍。模块原理图如图9所示。

2.3.4 舵机
望文生义,舵机是操控舵面的电动机,驱动方位伺服的驱动器。它能够接纳特定的操控信号,输出稳定的视点,适用于视点不断改变且需求坚持的操控体系。本体系选用MG995舵机,它由舵盘、减速齿轮组、方位反应电位计5 kΩ、直流电机、操控电路板等组成。

MG995舵机操控图如图10所示。有3条线,分别是:电源线V CC 、地线GND、操控线。舵机的操控联系,如图11所示,假如PWM的起伏为5 V,则其输出轴将坚持相应的视点。不管外部扭矩怎么改变,只要在供给下一个宽度脉冲信号时,输出视点才会更改为新的相应值。
3 长途操控间隔试验
Leap Motion API在获取到人体手势数据后长途操控仿生人手指的运动。为了更好地测验蓝牙5.0的无线传输稳定性,故在空阔处设置10组不同的间隔,验证不同间隔对仿生人手指的灵敏度和稳定性的影响。如表1所示,在间隔5 m、10 m的阈值力、手指屈伸和呼应时刻都相同,但跟着间隔添加,3个丈量的量越来越小,直至30 m时,蓝牙接纳不到PC端传来的数据流。

4 定论
本文经过对国内外手势交互技能的研讨以及LeapMotion技能的基础上,研讨了Leap Motion在智能仿生手中的使用,该电路配有蓝牙模块,可长途操控仿生人手的移动。现在仿生人手的操控形式相对单调,大多选用传统操控方法,可是传统的操控方法一般依靠键盘等其他的输入东西,所以操作过程杂乱,假如能够连接到人机交互的Leap Motion传感器界面里,使操控仿生人手更便利,这是一种新式的机器人操控形式,让人们直接用自己的双手指挥机器人做出想要的动作并帮忙人们完成任务,但体系的长途操控间隔还待进步,挑选蓝牙5.0作为长途通讯模块间隔到达30 m就无法接纳到数据流,且呼应速度不行抱负。
参考文献
[1] 王红全,淮永建.依据Leap Motion手势辨认方法在树木交互的使用[J].计算机使用与软件,2018,35(10):153-158.
[2] 李松林,徐大杰,张文.依据Leap Motion的六自由度机械臂操控体系[J].电子世界,2017(15):158.
[3] 王豫.依据Kinect的手臂关节三维运动捕获[D].杭州:浙江大学,2015.
[4] 况鹰.依据Kinect运动捕获的三维虚拟试衣[D].广州:华南理工大学,2012.
[5] 刘源.人手抓取运动解析及姿态协同仿人手研讨[D].哈尔滨:哈尔滨工业大学,2018.
[6] 刘浩.从三阶魔方谈空间图形旋转改换矩阵[J].课程教育研讨,2018(27):145-146.
作者简介:
辅导教师:
王建亮(1982—),男,高级工程师,硕士,首要研讨方向:智能仪表。
张起浩(1995—),男,本科,首要研讨方向:智能硬件规划。
蒋少国(1998—),男,本科,首要研讨方向:智能硬件规划。
辅导教师评语:论文选题有意义,在吸收学术界研讨成果的基础上,有自己的心得体会,提出自己的观念,言之有理。论说观念正确,资料比较充分,叙说层次分明。
本文来源于科技期刊《电子产品世界》2019年第9期第39页,欢迎您写论文时引证,并注明出处。