


跟着石油天然气勘探开发作业的不断发展,咱们所面对的勘探目标和开发环境也越来越杂乱、越来越困难。地震办法面对着杂乱结构油气藏、岩性油气藏和裂缝油气藏勘探及寻觅“剩下油”的艰巨而杂乱的使命。因而需求不断地展开适应于上述杂乱介质情况下的地震波理论研讨和地震物理模型试验研讨,并将地震波理论研讨与试验研讨两者严密结合起来。
地震物理模仿技能正是在这种布景下发展起来。所谓地震勘探物理模仿技能,便是依据地震勘探现场收集数据,用必定的材料,按必定的份额,制造出与实践地质结构在形状、结构和物性等方面的首要特征适当的物理模型,并对此物理模型模仿户外地震勘探作业,进行各种方法的数据收集,再对收集材料进行处理,用以研讨地震波在地质体内的波场特征、地震勘探的户外作业办法、处理办法和材料解说等理论和实践问题。
1 体系结构和作业原理
整个体系首要由模型、激发源和接纳器,驱动定位体系,数据收集体系构成。其间定位体系的硬件设备,包含运动操控驱动操控电路板,伺服电机驱动体系,光栅反应体系。完结方位脉冲的发送,体系准确认位。收集硬件设备—-选用HP公司高精度高速AD器材,经过USB2.0接口完结对硬件设备的初始化以及收集数据的传输和存储。
首要,依据地震物理模型,在上位PC机上树立模仿收集观测体系,然后,依据观测体系事前规划好的进程,驱动定位体系移动,到达要求的方位后,触发同步信号,一路使能激发源发送模仿户外震源的地震波,一起,另一路触发接纳器接纳地震信号,经过AD芯片收集转化,转变为数字信号,经过USB2.0接口芯片,操控传输到上位核算机。
2 地震物理模仿体系规划技能特征
2.1定位体系选用全闭环操控方法
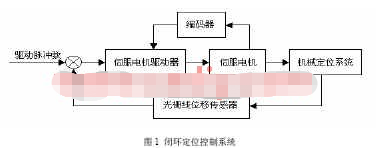
上位机发送驱动脉冲,经过伺服电机驱动器和伺服电机驱动整个机械体系移动,因为伺服电机驱动器和伺服电机自身选用编码器反应结构,能够确保整个伺服体系发送驱动脉冲的肯定准确,然后确保电机自身运转转数的准确。但因为机械体系自身机械差错的存在,例如齿轮空隙,丝杠、导轨外表不平等体系差错,因而,选用光栅线位移传感器构满足闭环体系,光栅实时反应机械体系的实践方位,确保机械体系定位精度的肯定准确。同步信号的触发便是经过读取光栅反应的脉冲数发生的。(体系结构如图1所示)
2.2 使用FPGA(可编程器件)完结与光栅接口电路
光栅线位移传感器能够将机械体系移动的长度以脉冲串的方法反应输出,输出信号为两路TTL电平的脉冲,彼此位相差为90度。反应差分脉冲包含着定位体系移动长度的准确信息,但一起,因为体系有伺服电机及电源驱动器和大功率变压器等强电设备,电磁噪声搅扰存在,有必要对光栅回来的脉冲进行技能处理,处理部分电路在FPGA(可编程芯片)内部完结。
FPGA芯片选用Altera公司的FLEX10K系列EPF10K20芯片,该芯片集成可用逻辑门数为两万门,外部结构为240脚表帖芯片。规划中可选用VHDL言语描绘和原理图描绘两种方法。在可编程器材中完结的电路功用模块有:噪声处理电路、四倍频电路、同步信号触发电路和计数、锁存电路。
其间,噪声处理电路原理是:一般搅扰信号为窄脉冲随机信号,而对光栅回来的脉冲信号,由定位体系移动的最高速度能够核算出反应脉冲的最小宽度大于等于10us。因而,噪声处理部分,是依据回来长度脉冲串和随机搅扰脉冲的脉宽差异,进行的去噪处理。
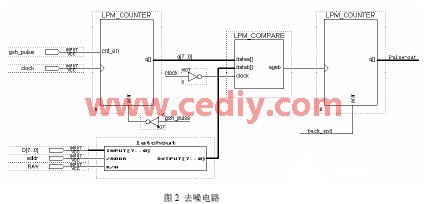
原理图如图2所示。由计数器1,2和比较器组成。其间计数器1为脉冲宽度计数器,CLK-EN接输入脉冲信号,脉冲信号的上升沿触发计数器计数,下降沿中止计数器,计数器的时钟信号由片外晶振片供给,频率为20MHZ,脉冲宽度为0.05us。关于驱动脉冲,脉宽大于10us,计数器值大于200,而一般搅扰脉冲的脉宽远小于10us,计数器记载的数值小于200。比较器设置为dataa[]大于等于datab[]数值时,输出脉冲信号,datab[]比较初值为200,比较端dataa同计数器1的计数输出端相连,脉宽大于设置初值的脉冲触发比较器输出脉冲,被确以为驱动脉冲,送入下一级计数器计数,小于设置初值的脉冲,不能触发比较器,不参加回来脉冲计数,然后,防止随机搅扰信号,确保回来脉冲的准确。
光栅反应选用相差90度的差分脉冲,有利于进步反应体系的抗搅扰才干,但在接口电路中,为到达光栅实践检测的精度,需求将回来的差分脉冲四倍频处理,行将脉冲量化为本来的四分之一。一起,依据两个脉冲的相位差,判别机械体系移动方向。
同步触发信号用来使能激发源发送模仿地震波的超声信号,一起,发动A/D转化器开端数据收集,在机械体系高速移动中发生准确、安稳的同步触发信号是技能的要害。同步信号的触发是依据比较计数光栅反应的脉冲数完结。由计数器、比较器和数据锁存器组成的电路发生。其间,数据锁存器用来设置比较器比较初值,由上位机依据道距离长度来设置。计数器实时记载经过处理后的光栅反应脉冲数,计数器输出端与比较器比较端相连,计数器由输出的同步信号清零。当比较器两输入端口数据持平时,比较器输出端口发送同步触发信号Trigger,一起,同步触发信号对计数器清零,从头计数,比较,触发。
2.3 依据USB2.0接口的数据收集体系规划技能
2.3.1硬件规划
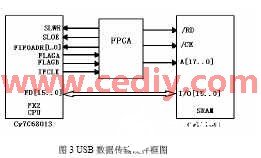
规划开发中选用Cypress公司的EZ-USB FX2系列芯片Cy7C68013完结USB2.0通讯技能,完结对收集数据的高速度传输。这种芯片是带智能USB接口的单片机,它将USB2.0通讯接口协议、可编程外设接口整合到单片机集成电路中。集成的USB收发模块与USB总线的D+和D-引脚相连。功用强大的串行接口引擎(SIE)以硬件的方法完结USB通讯接口协议、进行串行数据译码和过错更正,以及其它USB所要求的信号级操作等,最终发送数据字节到USB端口或从USB端口接纳数据。它完结的数据传输速度有两种:全速—12Mbps,高速—-480Mbps。
本文选用从机方法,FX2的CPU只是用来初始化参加USB传输的各功用寄存器。由FPGA芯片作为操控主体,经过判别FX2片内FIFO数据的存储状况,操控发生读写操控时序信号,完结外部数据存储芯片SRAM与USB芯片内部FIFO之间的数据传输。硬件原理框图如图3所示。
FPGA操控FX2数据传输的内部逻辑框图如下:

Slave FIFO通道设定,在FPGA内部挑选完结数据传输的FX2内部FIFO通道。FPGA经过读取由FX2送出的FIFO状况字,判别FX2内部FIFO数据是否为空,当确认FIFO数据为空时,敞开IFCLK传输通道(IFCLK由FX2芯片内部送出),在WR-EN外部写信号有用时,触发读写操控时序和发生SRAM的地址信号。其间,在IFCLK上升沿,触发SRAM地址发生计数器,选通数据的存储地址。在IFCLK的下降沿,触发SRAM-RD读信号有用,一起,触发FX2的FIFO写操控信号SLWR、SLOE有用,经过16位数据总线,将SRAM中数据送入USB芯片内的FIFO存储器中。用于时序操控的数据传输时钟IFCLK最高作业频率为48MHZ,能够经过对寄存器IFCONFIG的第七位装备,从FX2片内送出。
2.3.2 USB芯片固件程序的装备
程序结构用于加快开发依据EZ-USB FX2系列芯片的外设,结构为FX2的初始化、处理规范USB设备恳求及USB挂起时的电源处理,供给交互函数。程序结构供给的使命调度函数:
TD-Init(void):该函数在结构初始化时被调用,用来初始化用户的全局变量。
TD-Poll(void):在设备作业期间被重复调用,完结USB传送数据操控。它包含一个履行外设功用的状况机。
经过编写固件程序,将Slave FIFO设置成AUTO_IN/AUTO_OUT方法,在这种方法下,CPU不介入数据传输进程的操控,整个数据交换由外设FPGA供给时序操控逻辑,从外部看,USB芯片只是是一个数据传输的通道,然后真实完结了USB的高速传输。
AUTO_IN/AUTO_OUT方法软件装备在固件程序的TD-INIT()内,编写流程:
1. 装备IFCONFIF[7:4],界说接口时钟是否为外设供给。
2. 置位IFCFG1:0=11,使得USB相应端口装备为从FIFO方法。
3. 复位FIFO个端口。
4. 置位EP*FIFOCFG-4=1,将对应的Slave FIFO设置成AUTO IN方法。
固件程序的TD-Poll()函数,为数据传输的操控代码段,因为采AUTO_IN/AUTO_OUT方法,外部 的FPGA供给操控逻辑,CPU不参加USB数据包传输的操控,该函数内部不必编写代码。
3 结束语
本文体系规划是在原地震物理模仿体系根底之上的改造晋级项目,在体系操控上,首要经过选用FPGA技能和USB2.0技能完结。经过将近一年的运转证明,功能较本来体系有了大大改善。收集速度大幅度进步:以大港地震物理模仿收集为例。大港油田地震物理模型为三维模型,依据观测体系规划,收集道数为一千万道,每一道采样点数为4096,每一个采样数据为4个字节,整个收集数据量142G,依照本来定点收集方法核算,大约需求挨近半年才干收集完结。在试验室实践作业中,选用新规划的体系收集,机械体系移动速率10KHZ,道距离相同为1.5mm,每隔1500脉冲触发一次收集,每天收集10万道,只用了30天就完结了模型的收集作业,收集速度大大进步。定位精度大大改善:经过在FPGA芯片内部的硬件编程逻辑操控,完结对伺服电机驱动器的准确操控,完结发送脉冲的反应操控,完结实践移动方位的实时反应校对,使得定位体系定位的准确度得到进步,整个机械体系最小移动脉冲当量为1um,定位精度能够到达0.02mm,然后使得收集数据的质量大大进步。2004年4月,体系顺畅经过了我国计量科学研讨院长度处检验。
责任编辑:gt






