刚从师兄那里拿过来板子,便刻不容缓的开端了Zedboard的学习之旅。说实话,从刚开端报名参与这个竞赛,便对开发板是欣羡不已,只可惜没时机细心研讨,现在拿到手了,尽管说好的捐献并没有及时发过来(真的很抑郁),但还好,师兄现在不必,所以就先拿过来用几天!好了,废话不多说!开端谈正题!
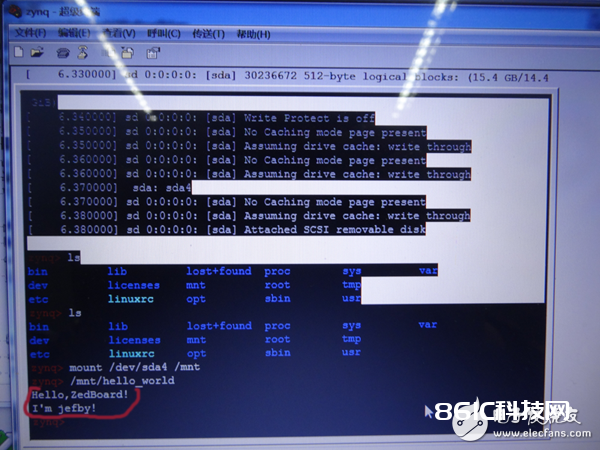
关于这个板子的基本情况,不了解的能够去百度下,在这里就不再做赘述了,仅仅记录下自己如安在拿到开发板之后,怎样从零开端构建并运转linux体系,并在其上运转一个hello_world程序。先附上成功运转截图:
第一步,装置arm-linux穿插编译器,在网站 https://code.google.com/p/zedboard-book-source/downloads/list 上的download里下载
赤色所圈出的文件,假如不想装置双体系,能够在虚拟机VMware上装置Ubuntu10.04_i386,然后将翻开将该文件复制到linux体系中,(笔者是放入了同享文件夹中,办法百度,很简单找
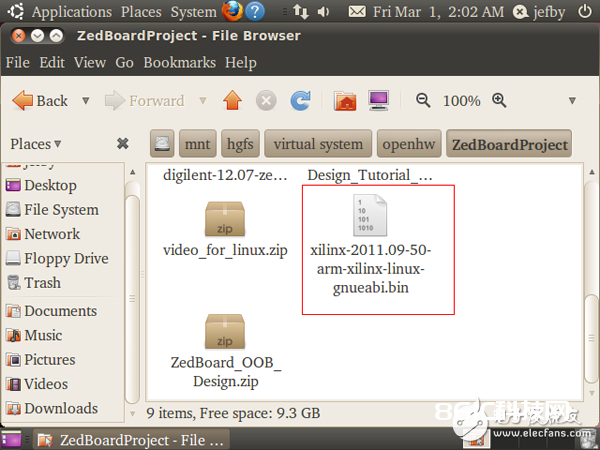
然后,进入如下目录,装置xilinx-2011.09-50-arm-xilinx-linux-gnueabi.bin,详细步骤如下:
(有必要确保当时现已进入到该文件地点的文件夹)
>sudo –s
>输入暗码
>./xilinx-2011.09-50-arm-xilinx-linux-gnueabi.bin,附图如下

呈现图如下

一路默许就好了,终究装置完结后如下所示,
装置完结后,修正当时dash为bash,详细办法如下:
弹出如下对话框,挑选NO,即可。
最终,修正/etc/bash.bashrc文件,在其间增加如下代码:办法如下:
在命令行上输入gedit /etc/bash.bashrc

第三个export即为默许的软件装置途径。
最终,封闭该文件,并使其当即收效,输入source /etc/bash.bashrc。
此刻,能够检查当时的PATH是否现已成功更新,在命令行上输入$PATH,若其间有上述PATH,则更新成功!
在网站 ?NavPath=2,400,1028Prod=Z… 上下载
如赤色线条所画文档,并解压,将解压后的文件夹sd_image中的文件,复制到sd卡上(在这之前确保sd卡被格局化为FAT32格局)。然后将SD卡刺进到开发板上,按如图所示


衔接线路,留意赤色线条所示的部分,
编写测验文件hello_world.c
#include
int main()
{
printf(Hello,ZedBoard!\nIm jefby!\n);
return 0;
}
在命令行下如下编译(进入到该文件地点的文件夹)
>arm-xilinx-linux-gnueabi-gcc -o hello_world hello_world.c
将生成的文件拷贝到U盘中,然后按图1所示衔接电路,上电,呈现如下问题,
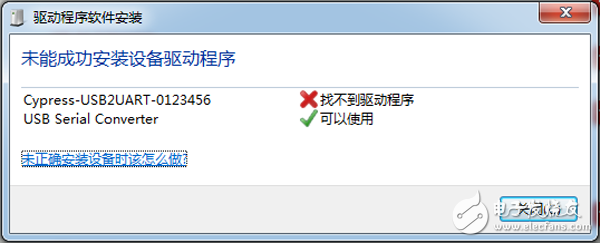
下载驱动,翻开设备管理器,更新驱动程序(CyUSB2Serial_v3.0.11.0.zip),又呈现如下问题,
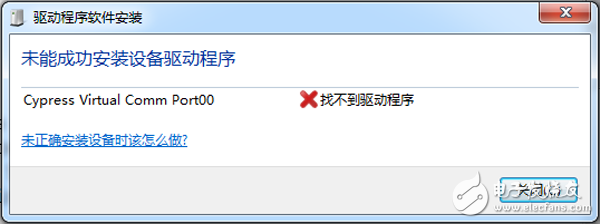
再次更新此驱动(同一个目录),至此驱动装置完结。
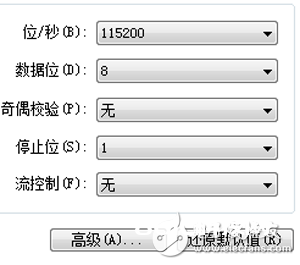
运用超级终端( windowsSuperzd.rar )树立串行衔接,如下设置串口参数
最终输出如下:(部分图)

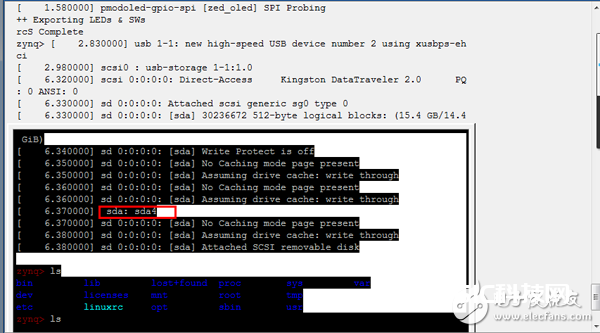
红线所示为笔者U盘的挂载称号
在命令行下将其挂载到mnt下,并运转hello_world,详细如下,
Ok,到此就功德圆满了!