


高速、高精度始终是数控技能寻求的方针。在高速加工中,有必要要求各运动轴能在极短的时刻内到达给定的速度并能在高速行程中瞬间准停。假如仅从时刻上去考虑缩短过渡进程,而不对机床的加减速动态进程进行合理的操控,必将给机床结构带来很大的冲击。跟着核算机总线技能越来越老练,数控体系也由固定方法发展为具有敞开性结构,能便使用户进行客制化重组的柔性方法。结合数据库原理,将影响体系过渡进程的加减速曲线,选用变结构操控办法,能有用进步数控机床的动态功能和稳态精度。
变加减速结构操控原理
传统数控体系中,一般由体系程序直接完结单一特定的加减速操控。它无法确保在机床启停频频的情况下,一起满意高进给速度的瞬间起停和机床工作的平稳性。为处理此问题,一方面要求数控体系能因机而异、因时而异来动态确认加减速操控规则;另一方面,需在操控体系中选用特别办法来完结这种加减速曲线。本文提出的变加减速结构操控办法选用数据库原理,将加减速操控分为加减速描绘与施行两部分,并将加减速描绘与体系程序相别离。这样,若要改动体系的加减速操控规则只需独登时修正加减速描绘数据,而不需求修正数控体系程序,从而为用户供给一种敞开的改动加减速曲线新办法。其原理为:将各种抱负的加减速曲线事前进行数字式处理,得到其离散化,并以样板数表的方法存放于数控体系内的加减速曲线库中。在数控体系软件中,则规划一条通用的与加减速数据库内容无关的操控通道,由其独立完结加减速核算和轨道操控。该办法的完结原理如图1所示。
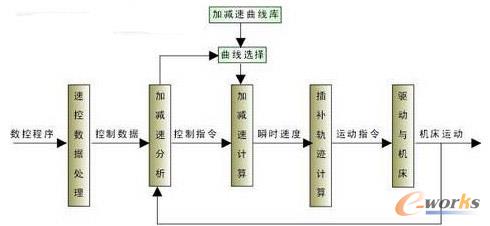

图1 变加减速结构操控原理框图
图1中,加减速曲线库中存放着各种样板曲线。体系工作时,首要依据数据处理模块给出的有关操控数据和来自检测反应环节的机床实践工作数据进行加减速剖析。如需加减速操控,则告诉曲线挑选模块从加减速曲线库中选出最合适的加减速曲线,并宣布加减速操控指令给加减速核算模块,由其依据所选定的加减速曲线核算出当时采样周期的瞬时速度。进一步由插补轨道核算模块生成作业台运动轨道,并宣布运动指令送往驱动设备,最终由驱动设备以期望的加减速操控规则驱动机床运动,从而使机床运动的动态特性到达最佳。
三轴运动作业台组成及特色
整个体系以依据“工业PC机+专业运动操控卡”为中心,选用松下数字沟通伺服体系构成一个敞开式硬件结构。一起装备内容丰富、功能强大的运动函数库,选用VC++面向对象的编程技能,完结PC机、运动操控卡和伺服驱动器之间的通讯,其结构如图2所示。
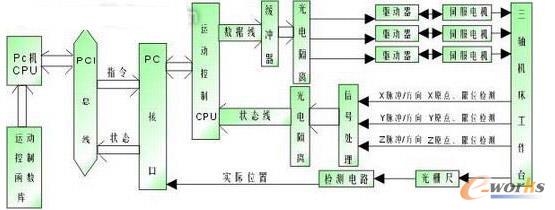
图2 三轴运动体系组成框图
PC机首要完结加工程序的输入、修正、参数设置、运动状况显现以及加减速剖析核算等非实时操控。运动操控卡完结各运动轴插补轨道核算、输出脉冲/方向运动指令信号以及接纳机床上一些与运动操控有关的I/O量输入。其间,脉冲信号操控电机所走的步数,方向信号操控电机正回转,以完结三轴的方位操控。X轴、Y轴、Z轴原点、限位检测是经过一组机械开关来完结,原点检测开关用来生成用户三维运动体系坐标系原点,限位检测开关确保每轴作业行程极限。这些状况信号经逻辑电平整形电路、光电阻隔电路后送入运动操控卡状况寄存器中,由CPU随时读出,到达对I/O状况信号的检测。在硬件上,因为选用了光电阻隔办法,这样,既阻隔了外设对内部数字体系的搅扰,又能有用地避免过电压、过电流等外界突发事件对核算机体系的损坏,大大进步了体系的操控精度和可靠性。
本体系充分发挥了PC机软件资源丰富和核算速度快的长处,吸收CAD/CAM的特色,在使用造型软件生成零件图后,再使用数控体系转化为加工G代码,将指令G代码与机床实践方位进行剖析比较发生瞬时速度,然后由板卡将其解释为运动轨道操控函数,最终经过调用运动函数库内的插补程序段,输出脉冲和方向信号,操控半闭环方位伺服体系带动作业台工作,完结所期望的空间轨道途径动态特性和稳态精度。
依据松下沟通伺服电机驱动器半闭环方位操控的完结
在松下伺服驱动器接线端子上,PULS1、SIGN1别离与运动操控器的脉冲信号和方向信号相连,PULS2、SIGN2接+5V信号,构成集电极开路的方位传输信号。COM+,COM-别离接+15V电源正负端。SRV-ON与COM-相连。这样,就完结了方位操控方法下的根本连线。其它连线可依据体系的需求进行恰当衔接。参数设置经过接触面板进行,操控办法挑选置为方位操控,转矩约束置为输入无效,驱动制止置为输入无效,指令脉冲输入办法挑选置为脉冲/符号办法,指令脉冲制止置为输入无效。每转输出脉冲数置为2500。电子齿轮比可依据实践需求进行设置。因为伺服电机经过联轴器与作业台的滚株丝杠相连,机械刚性高,将主动增益调整时,机械刚性置为9,确保整个传动体系的高速呼应性。增益参数选用主动调整办法:依照预订(内部设定)的方法使电机加快和减速,从所需转矩核算负荷的惯量,然后依据惯量,主动地决议恰当的增益。其它参数按出厂时的缺省设置。因为传动组织选用了半闭环沟通伺服驱动,操控精度和工作速度得到极大的进步,大大进步了产品的性价比。
在方位操控办法下,伺服驱动器接纳运动操控器宣布的方位指令信号(脉冲/方向),送入脉冲列形状,经电子齿轮分倍频后,在误差可逆计数器中与反应脉冲信号比较后构成误差信号。反应脉冲是由光电编码器检测到电机旋转时所发生的实践脉冲数,经四倍频后发生的。方位误差信号经方位环的复合前馈操控器调节后,构成速度指令信号。速度指令信号与速度反应信号(与方位检测设备相同)比较后的误差信号经速度环份额积分操控器调节后发生电流指令信号,在电流环中经矢量改换后,由SPWM输出转矩电流,操控沟通伺服电机的工作。方位操控精度由光电编码器每转发生的脉冲数操控。它分增量式光电编码器和肯定式光电编码器。增量式编码器结构简略,易于把握,均匀寿命长,分辨率高,实践使用较多。本体系选用的是增量式光电编码器。肯定式光电编码器按二进制编码输出,信号线多,因为精度取决于位数,所以高分辨率不易得到。可是这种编码器即便不动时也能输出肯定视点信息,首要用于全闭环高档数控机床中。松下公司增量式光电编码器伺服电机驱动器方框图如图3所示:
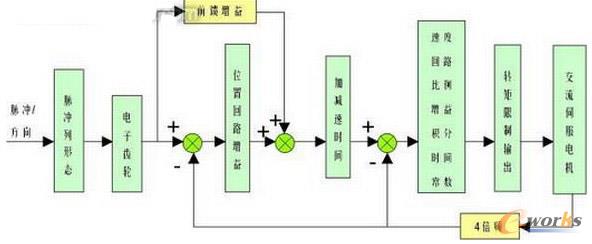
图3 松下公司伺服驱动器操控方框图
结语
合理的主动加减速操控是确保高速运动体系动态功能和稳态精度的重要环节。传统的依据固定曲线的主动加减速操控因为缺少柔性,不易确保在机床工作平稳的前提下,完结以过渡进程时刻最短为方针的最优加减速操控规则,难以满意高速加工对精度的要求。选用变加减速结构,使用体系的敞开性,将加减速描绘与数控体系程序相别离,使得改动体系加减速功能时只需独登时修正加减速描绘数据,它可便利地用实时离散数据库来完结。这样,体系可按实践情况改动升降速操控曲线,确保机床工作的滑润性,是一种适合于高速加工的柔性主动加减速操控办法。






