


自从1920年捷克斯洛伐克作家卡雷尔,恰佩克的《罗萨姆的机器人全能公司》面世,人们便对机器人充满了梦想与等候。跟着社会的不断开展,各行各业的分工越来越明细,机器人也能在其间扮演重要的人物来代替人们的劳作。与此一起,跟着科学技能的开展,探险、救灾、排爆等风险场合作业的机器人,以及主动化生产中机器人的使用也日益广泛。因而,智能救援机器人的研发已成为急需和必要,文章就智能救援机器人的规划进行了讨论。
1 智能救援机器人的硬件规划
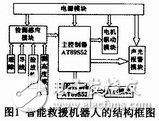
该智能救援机器人首要由电源模块、检测感应模块(完结巡线、避障、捡放硬币、测距功用)、声光报警模块、操控器模块、电机驱动模块、显现模块六部分组成,其结构框图如图1所示。
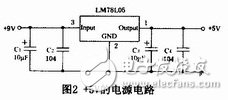
智能救援机器人悉数能量来源于坐落机器人底部的六节五号电池,经过传统的7805稳压电路给其单片机及外围传感器供电,其电路如图2所示。部分传感器选用5V低电压供电能够防止机器人过早检测障碍物而中止行进。
1.2 检测感应模块
1.2.1 巡线电路
巡线模块咱们选用红外对管。红外对管由LED和光电三极管组成,光电三极管依据从地上反射回来的LED的光的强度而改动活跃基极电流。在光电三极管基极接一上拉电阻,则可依据基极电压的丈量判别反射光的强弱,强光阐明勘探器下方是白色,弱光阐明下方光较弱,大部分光被黑线吸收。关于输出的模拟信号,咱们将其引进五个电压比较器LM339进行处理。电压比较器LM339的一输入端接红外对管,另一端接滑动变阻器,经过对滑动变阻器的调理能够完结对红外对管对黑线的灵敏度。比较器LM339的另一端接上拉电阻后进入单片机进行勘探。
1.2.2 避障电路
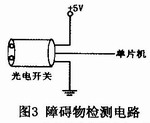
避障部分选用光电开关,将其安放在机器人需求丈量的各个方向。为削减它的丈量间隔确保机器人的正常运转,咱们选用的是低电压5V供电,供电电压虽略显缺乏,但能确保它的正常短间隔勘探。光电开关的信号线的凹凸电平可反映前方障碍物的有无,障碍物检测电路如图3所示。
1.2.3 超声波测距电路
因为超声波履行性强、能量消耗慢、在介质中传达间隔较远的特色。咱们选用DIP-ME007超声波测距模块完结高度的丈量功用,其电路板如图4所示。DIP-ME007超声波测距模块能比较敏捷、方便地测出桥底部距测距模块之间的间隔,此模块共有五个引脚VCC、tring、echo、out、 GND。DIP-ME007超声波测距模块输出为pwm方法,VCC、GND接好后向tring发一个10 s以上的高电平,就能够在接收口echo等候高电平输出。单片机选用跳变沿触发,触发后即开端计时。当电平变低后即开端读定时器,此刻的值即为此次测距所用的时刻。依据S=Ct/2即可得出所测得的间隔。如此周期性丈量即可完结移动测距。单片机内部主动将测得数据保存并与上一次测距成果比较,保存最大值,当接连五次未测得大于前一次的数据时中止检测并记载最大值。当再次检测到黑线即已成功过桥,是时单片机操控显现模块将测得的最大值在液晶屏上显现出来。

1.3 操控器电路
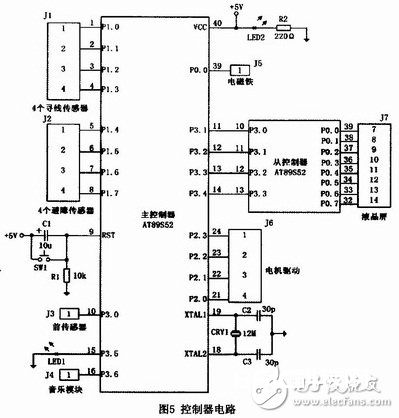
因为主操控器的使命较多,电路要求引脚较多,且显现器的操控程序较为杂乱,咱们独自装备了一个相同的单片机作为主操控器的辅佐部分,经过它来分管主操控器的作业,来完结显现部分的作业。其间主操控器与其它模块的衔接如图5所示。
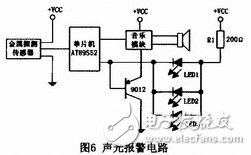
1.4 声光报警电路
声光报警模块首要使用于搜救报警电路中,一起为进一步扩展使用,咱们在操控其开关的一起引进另一条信号线完结了对声响的操控。在搜救进程和安全抵达安顿区时经选用不同频率和音色的声响给出表明。寻觅硬币咱们选用金属勘探传感器,当发现金属时,其信号线上电平从低电平变为高电平,触发单片机中止,在单片机的操控下机器人中止运动,发动音乐产生模块并点亮LED进行声光报警,详细完结电路如图6所示。
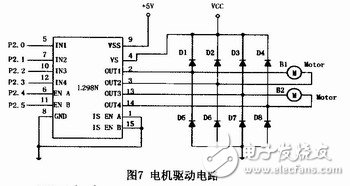
1.5 电机驱动电路
单片机经过传感器的反应信号操控电机正转、回转或许中止,来完结操控机器人完结各种动作。L298N是专用电机驱动芯片,他能够完结电机的正回转、刹车、pwm调速等多种功用,是对机器人电机进行操控的比较抱负的芯片,因而咱们选用L298N芯片对两个一般电机进行操控。经过编程完全能够操控完结标题的基本要求和发挥部分,也可增加各种立异功用。L298N芯片信号电源与驱动电源的分隔,能够依据需求对电机的电压进行调理,其驱动电路如图7所示。
1.6 显现电路
选用MSl602C-1型LCD显现相应的信息。此显现器模块的作业电压为5V左右,支撑显现2行字符,每行可显现16个字符,每个字符由5&TImes;7点阵显现。能够经过编程完结多种显现,显现信息比数码管更多,显现作用更好。
因为主操控器的单片机使命较多,电路接线较杂乱,咱们选用独自的单片机操控显现模块。
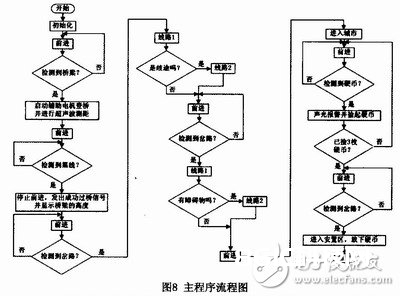
2 智能救援机器人的软件规划
本智能救援机器人的软件操控部分选用C言语编程,凭借C言语的强壮功用来完结单片机AT89S52的操控功用。主程序流程图如图8所示。
3 定论
以AT89S52单片机为核心部件,使用红外传感检测、电机操控等技能,经过各种计划的讨论及测验,再经过屡次的全体软硬件结合调试,不断地对体系进行优化,最终智能救援机器人能够完结;避开障碍物,并寻觅到适宜的途径;顺畅经过受损的桥梁,并能较精确地测出桥梁的高度;主动识别道路情况,并依据实时情况快速做出判别,精确操控机器人的转向;主动显现所要求的信息;主动寻线行进,能智能检测、捡起、放下硬币;声光报警,并有彩灯闪耀;行进到规则的地址主动中止并显现救援完毕。
在规划进程中,力求硬件电路简略,外形漂亮,充分发挥软件规划的优势来满意体系的要求。






