摘要:介绍了一种毫米波测速雷达体系的作业原理,该体系选用高精度谱剖析法丈量外弹道弹丸速度曲线,并运用最小二乘法拟合办法推出弹丸的初速。剖析了测速差错、精度与测点数、外推步长的联系。该体系将毫米波技能成功使用于火炮或枪支的内、外弹道参数的测验。经过与国外同类产品测验比对,证明该体系具有较高的测验精度。
关键词:毫米波雷达,初速,谱剖析
跟着兵器测验技能的前进、传统的测速技能,如靶圈测验、天幕靶测验等办法因测验进程 繁琐,精度较差,已不能满意实时战地测验的需求。而毫米波测速雷达将毫米波技能成功使用于火炮或枪的内、外弹道参数的测验。毫米波测速雷达较现有各种测速雷达具有体积小、重量轻,在使用于内、外弹道的测验中作业牢靠、测验简洁、快速、准确、操作运用便利等特色;火炮初速值的测定还可用于对火炮初速的猜测,对进步火炮的射击精度具有重要的含义。
1 测速雷达体系结构及作业原理
毫米波测速雷达体系主要由高频头[1]、预处理体系、终端体系和红外启动器等组成,其原理结构如图1所示。
毫米波振荡器发生毫米波(8mm)振荡,设其频率为f0,经隔离器加至环行器,再由天线定向辐射出去,并在空间以电磁波方式传达,当此电磁波在空间遇到方针(弹丸)时反射回来。假如方针是运动的,则反射回来的电磁波频率附加了一个与方针运动速度vr成正比 的多普勒频率fd,使反向回波频率变为f0±fd(方针挨近飞翔取“+” ,方针远离飞翔取“%”),此回波被天线接纳下来,经环行器加至混频器,在混频器中与经环行器走漏的信号(作为本振信号)f0进行混频。混频器为非线性元件,其输出有多种和差频率,如fd,f0±fd,2f0±fd,…,等,经前置扩大器选频得多普勒信号(频率为fd),再经长电缆(长50~100m)送至预处理体系的主扩大器,主扩大器附有主动增益控制与手动增益控制电路。手动增益用来调整扩大器的总增益,主动增益控制用来添加扩大器的动态规模。
内弹道测验一般不运用主动增益控制。主动增益控制只适于测验外弹道,由于外弹道测验时,为了避开枪口火焰等的搅扰,应进行恰当推迟才开端测验。

图1 毫米波测速雷达体系原理结构图
多普勒信号经扩大器扩大,送至带通滤波器,若进行内弹道测验将开关置于全通(INT)方位,此信号再送到终端体系的高速采样ADC,并将成果送入高速缓存区,由数字处理器核算出内弹道l2t、v2t曲线。若进行外弹道测验,则将离散信号进行32次截短,一起求出每次截短的谱,依据主谱所构成的轨道,即可得到弹丸速度改变曲线,再依据此曲线按最小二乘法拟合,外推出外弹道初速v0,并给出v2t曲线。 起点与结尾电路确保测验在正确的时间进行,并给出测验的时间基准。内弹道测验一般运用主动起点,结尾信号可由红外启动器给出。在进行外弹道测验时,起点信号能够运用主动起点,也可用红外启动器信号做为起点,外弹道测验一般不设置结尾信号。
2 毫米波测速雷达的测速原理
2.1 测速原理
如前所述,毫米波测速雷达的测速原理是运用电磁波在空间传达遇到运动方针时发生多普勒效应来进行的。即雷达发射的电磁波(频率为f0)遇到运动方针时所发生的回波信号,频率为f0±fd,fd为多普勒频率,它与方针径向速度vr的联系为fd=[2vr/(c+vr)]f0.其间,c为光速,一般cµvr.由此得vr=(λ0/2)fd,其间,λ0=c/f0,为发射电磁波的波长。由此可见,只需测得fd(f0和c是已知的),即可由公式求出径向速度vr。
丈量fd大致有2种办法:时域法和频域法。因雷达作业环境恶劣(如枪、炮的冲击振荡,火焰电离等的影响),会使接纳到的多普勒信号的“布景”十分复杂,信噪比大大下降,选用传统的时域处理办法对被淹没在搅扰和噪声中的多普勒信号检出或辨认往往是困难的,使得测频精度显着下降。而选用频域谱剖析办法,挑选适宜的采样频率及恰当的窗口,能够大大进步测频精度和牢靠性。
2.2 外推初速的基本原理
毫米波测速雷达外推初速的基本原理,是丈量弹丸在外弹道开始某一段(如t1至tm)上若干点的速度,然后按外弹道规则外推出初速v0。
依据外弹道理论,在外弹道开始段,可将速度表明为v(t)=v0+αt+βt2.其间,v0是弹 丸初速,α、 β是契合系数。
将t1,t2,…,tm时间测得的速度v1,v2,…,vm表明为vi=v0+αTI+βt2 i+εi,i=1, 2,…,m,式中,εi是随机丈量差错 [2] ,它是一个随机变量,v0、α、β是待定参量,而v0正是要求的初速。依据最小二乘法,求出一组参数^v0、^α、^β,使速度丈量值的残差平方和Q= ∑ mi=1 [vi -(^v0+^αTI+^βt2i)]2 为最小。为此推导如下:
由5Q/5v0=0,5Q/5α=0,5Q/5β=0,可得:
式中, 。将(1)式写成矩阵方式则为:
。将(1)式写成矩阵方式则为:
S^θ=B
式中, 。
。
解方程(2),得:^θ=S -1 B。
当随机变量qi彼此独立,且遵守正态的N(0,σ2 )散布时,最小二乘估量^θ将有如下优 良核算特性,即(1)^θ是θ的无偏估量;(2)^θ是θ的最小方差估量;(3)VAR(^θ)=(σ2/m)S-1.无偏性阐明屡次估量的核算均匀挨近真值。最小方差是指在各种估量中,这种 估量能够使方差到达最小,方差小意味着估量值违背真值的程度小。因而,VAR(^θ)的巨细 能够作为^θ好坏的规范。设C=S-1/m相应的^v0的差错E(^v0-E^v0)=C11σ2 ,其间C11是矩阵C中对应的元素。为了剖析核算便利,设测点距离为等距,即t2-t1=t3-t2=… =tm-tm-1=Tz,而t1=αpTz=Ty,则矩阵S中的元素成为???? t=Z1Tz,t2 =Z2T2 z,t3 =Z3T3z,t4=Z4T4z.其间,Z1=αp+(m-1)/2,Z2=α2p+αp(m-1)+(m-1)(2m-1)/6,Z3=α3p+3α2p(m-1)/2+αp(m-1)(2m-1)/2+m(m-1)2/4,Z4=α4p+2α3p(m-1)+α2p(m-1)(2m-1)+αpm(m-1)2+(m-1)(2m-1)(3m2-3m-1)/30.依据 线性代数中矩阵求逆的办法可得:

可见估量值^v0的方差E(^v0-E^v0)=C11σ2 与αp及m有关,不同的αp和m有不同的方差。方差越小越好,一般是与丈量数据的差错εi的方差进行比较,因而界说η0=E[^ v0-E^v0]2/σ2 =C11为初速v0的方差压缩系数。当η0>1时,阐明外推初速的差错大于丈量差错;当η0=1时,阐明外推初速的差错与丈量差错持平;当η01时,阐明外推初速的差错均匀小于丈量差错。由前面联系可知η0=C11只与外推步长αp和丈量点数m有关,这样可经过挑选αp和m来到达所要求的外推精度。表1给出了使η0≈1时,不同步长αp所对应的测点数m,由表可见,外推步长αp越大,则所需测点数越多。毫米波测速雷达一般取m=32.此刻要使η0≤1,则可使αp≤6.例如,当测点距离约为5ms时,则推迟时间要小于30ms才干确保外推初速的精度与测点精度适当。

假如令m=32,则可依据前述公式核算出外推步长αp与外推v0的方差压缩系数η0的联系,如表2所示。

可见,从进步外推精度的观念动身,期望αp获得小一些(m已定),即推迟时间t1获得短一些,但t1也不行获得过短,不然无法避开膛口火焰、冲击振荡的影响。依据实践测验需求,测速雷达能够安装在火炮的摇架上,雷达的观测方向与弹丸飞翔方向共同,不存在视点批改。若架起在三角架上,此刻雷达的观测方向与弹丸飞翔方向有必定夹角γ,雷达所测速度,仅仅弹丸速度在γ方向的分速度,如图2所示。为减小这一测速差错,应尽量减小D,增大 L(即增大推迟时间t1)。
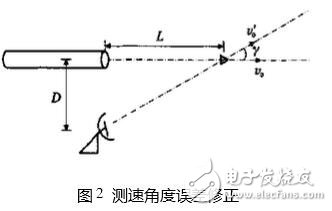
毫米波测速雷达为减小这一测速差错,一般取D=0.2~0.5m,L≥25D,此刻有L ≈v0t1,v′0=v0/cosγ,γ=arctan(D/L),测速的相对差错σ=(v0-v′0)/v0=1-v′0/v0= 1-v0cosγ/v0=1-cosγ。例如,测验某式7.62mm步枪,可取D=0.2m,设初速v0=760m/s,则要求t1≥L/v0≥25&TImes;0.2/760=6158ms.取t1=7ms,此刻测速精度为σ=1-cos[arctan(D/L)]=1-cos{arctan[012/(760&TImes;7×10-3)]}=711×10-4。
3 结束语
毫米波测速雷达现已成功使用于国内多家靶场,其测验精度达0.1%.经与国外582雷达及丹麦的伟伯尔雷达进行比对试验,测验成果共同。 在实践使用中,发现数据收集的推迟时间参数(外推步长)对测验的初速值精度的影响与理论剖析共同,但外推步长的设定也与其它许多因数有关,如它随不同的弹种、环境温度等而改变。关于推迟时间选定的机理和有关理论还需进一步研讨或经过很多试验证明,以进一步进步测验精度。
参考文献:
1 孟庆鼐,陆士良.八毫米微带多普勒雷达收发前端.合肥工业大学学报,1995,18(3):98-101
2 楼宇希著,雷达精度剖析.北京:国防工业出版社,1979