


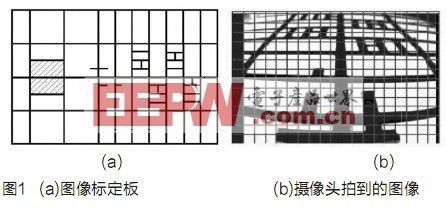
本文以飞思卡尔智能车大赛为背景,制作一个能巡线快速行驶的摄像头小车。由于摄像头光轴与地面呈一定夹角,于是其成像存在梯形失真;为了扩大视野,广角镜头越来越为很多队伍所采用,于是又存在桶形失真。本文提出的

汽车电子业界现已开始采用智能图像处理来将多个摄像头采集来的数据进行同步,有效的给车辆提供了“看”和“识别”周围环境的能力。众多的厂商也都在为创建更安全的驾驶环境这一共同的目标而努力。飞思卡尔推出的带有
飞思卡尔在低功耗和混合信号方面的先进技术导致出现更为灵活的微控制器(MCU),这些微控制器有许多关键的外围设备,可用来进行妊娠期监护的应用,包括妊娠糖尿病的监护。在所有对于医疗应用。

在过去四年,我们已经摸索到在出版行业中哪里应用AR技术可以获得很好的效果,哪里不太适合应用AR技术。我们正准备发起一个大型出版项目:好莱坞传奇人物卡尔·瑞娜新出的童书。
由于定位误差的存在。在GPS动态导航定位中.为提高定位精度.必须对动态定位数据进行滤波处理。文中在比较分析各种动态模型的基础上。提出了应用卡尔曼滤波的GPS滤波模型.并通过对实测滤波算例仿真.证实了模

IR2104芯片驱动电路实现智能车差速控制方案-常用的电机驱动有两种方式:一、采用集成电机驱动芯片;二、采用MOSFET和专用栅极驱动芯片自己搭。集成主要是飞思卡尔自己生产的33886芯片,还有就是L
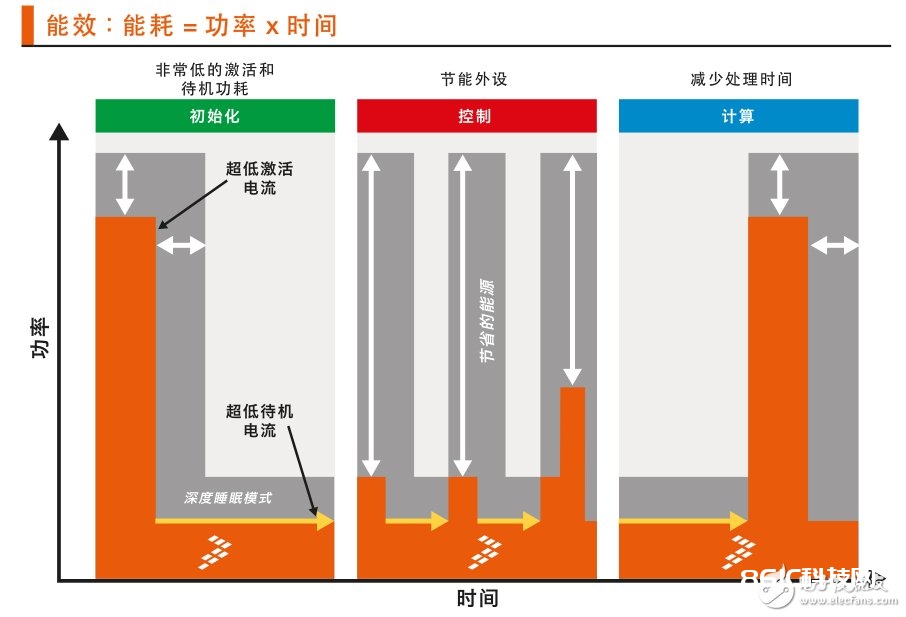
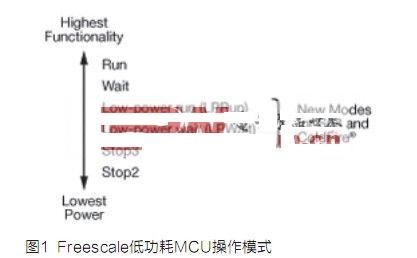
高能效入门级MCU 定义全新低功耗-飞思卡尔深入研究了MCU的所有阶段和各个方面,目的是解决更大的问题:你怎样用更少的能耗去做更多操作?结合整体观念来考虑能效问题对目前市场来说还比较新颖。飞思卡尔致

打破可穿戴设计尺寸和功效不能两全的困局- 本文概述了 ARM与飞思卡尔如何携手合作,提供面向可穿戴设备市场的领先半导体解决方案。其中最重要的是能够提供超级节能和体积小的解决方案,这些解决方案就是一次充

