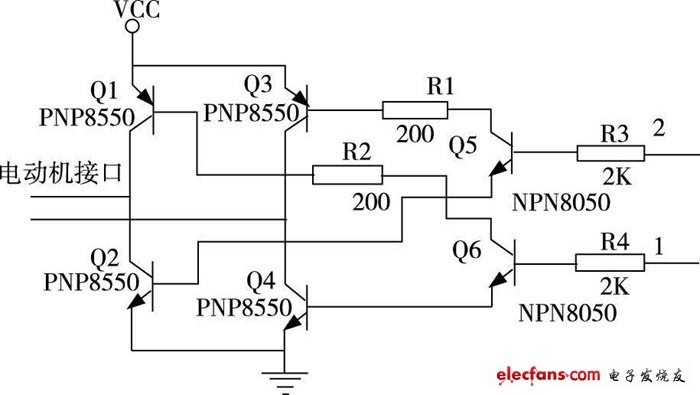
智能小车驱动电路是一个全桥驱动电路,Q1,Q2,Q3,Q4四个三极管组成4个桥臂,Q5控制Q2和Q3的导通和关断,Q6控制Q1和Q4的导通和关断,驱动电路分别用于后轮动力驱动电路和前轮方向驱动电路。当

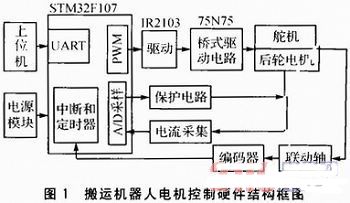
针对搬运机器人的前轮转向舵机和后轮驱动电机的控制要求,采用以Cortex-M3为内核的STM32F107作为主控制器,采用嵌入实时操作系统μC/OS-II,将程序分成启动任务、电机转速控制任务、舵机控

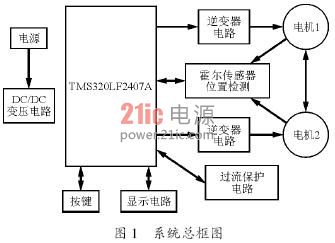
基于STM32F107的搬运机器人电机控制电路设计-随着人工成本的不断升高,用机器人代替人力去做一些重复性的高强度的劳动是现代机器人研究的一个重要方向。搬运机器人在导航寻迹中,需要后轮驱动电机和前轮舵