



浅析DSP下的车载导航系统硬件电路设计-车载导航系统电路采用TI公司的TMS320C6713B-A200作为DSP,该DSP芯片标称主频为200 MHz,工作在160 MHz主频时DSP处理能力为1600 MI·s-1/1 200MFLOPS。
基于FPGA EPlS30芯片和AD变换器实现导航系统的设计-INS/GPS组合导航系统在军事领域和民用方面的运动载体中得到了广泛应用。INS是组合导航系统中的核心部分,涉及多个陀螺仪、多个加速度计和温度传感器等众多传感器数据的采集与处理,同时对系统运算的实时性要求也很高。对于导航计算机系统的研究,许多学者做了大量有益的工作。
以SoC FPGA为设计平台的北斗卫星信号跟踪算法的设计- 全球导航卫星系统(Global Navigation Satellite System,GNSS)是维护国家安全、发展经济的重要基础设施,是体现国家综合国力以及现代化大国国际影响力的重要标志 。发展支持北斗导航系统的接收机终端是北斗导航系统不可或缺的组成部分。目前中国正在大力发展北斗卫星导航系统(BDS),因此大力研究与设计基于BDS的北斗卫星导航接收机成为北斗卫星导航系统重要的环节。
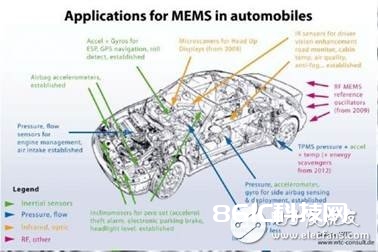
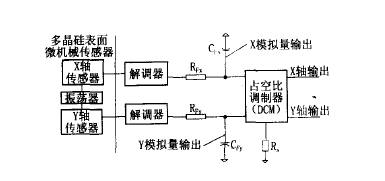
MEMS惯性传感器的背景及发展现状-MEMS ( Micro-Electro-Mechanical System )是指集机械元素、微型传感器以及信号处理和控制电路、接口电路、通信和电源于一体的完整微型机电系统。 MEMS 惯性传感器可构成低成本的 INS/ GPS 组合导航系统 , 是一类非常适合构建微型捷联惯性导航系统的惯性传感器。 MEMS 惯性传感器的突出特点使其在众多的民用和军用领域具有广阔的应用前景。 MEMS 惯性传感器的背景状况 MEMS 技术最早由 Richard Pfeynman ( 1965 年获得诺贝尔物理奖),在 1959 年提出设想。

风河VxWorks被欧洲EGNOS卫星导航系统(European Geostationary Navigation Overlay Service)项目作为完整性处理工具(Integrity Pro
对于在室外环境工作的移动机器人通常使用惯导/卫星组合导航方式。惯性导航系统[1]具有完全自主、抗干扰强、隐蔽能力好和输出参数全面等优点,但它的鲁棒性极低,误差会不断随时间累积发散。卫星导航系统具有精度

风河VxWorks被欧洲EGNOS卫星导航系统(European Geostationary Navigation Overlay Service)项目作为完整性处理工具(Integrity Pro
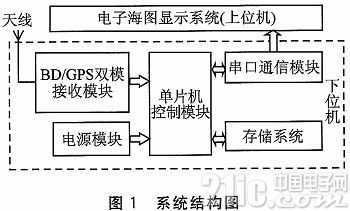
引言北斗卫星导航系统(BDS)是我国正在实施的自主建设、独立运行的全球卫星导航系统。有着集定位、授时、短报文通信及用户检测于一体的优势,然而目前北斗卫星导航系统的实际应用并不理想,用户终端设备价格偏高
摘要:北斗导航系统是我国自主研发的卫星导航系统,具有精确授时,短信通信及快速定位的特点。针对北斗天线和射频信号处理模块体积较大等问题,提出了一种利用蓝牙模块与北斗模块通信的便携式终端。系统以STM32
随着定位导航技术的飞速发展,车载导航系统在相关领域得到了越来越广泛的应用。车载导航系统的功能是帮助用户确定车辆位置并提供正确的操作指示,因此定位的精确程度成为衡量一套系统性能优劣的重要指标。目前,
