


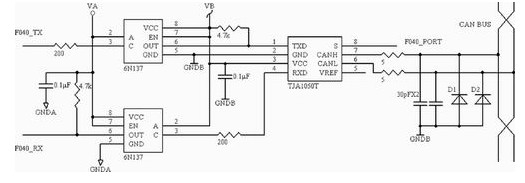
C8051F040单片机智能节点通信设计-C8051F040中的CAN寄存器分成3类: CAN控制器协议寄存器,消息对象接口寄存器,消息处理器寄存器。对于控制CAN主要功能的最重要的3个寄存器可以像单独的特殊功能寄存器( SFRs)一样采用直接访问的方式进行访问。它们分别是CAN控制寄存器,CAN测试寄存器和CAN状态寄存器。而对于其他一些寄存器则通过一个间接的指针机制进行访问。

单片机开发时的常遇问题解析-nRF24L01模块(使用Mirf库时)的自动应答问题:项目里使用一个nRF24L01(服务端)接收多个nRF24L01(客户端)的消息,发现客户端之间互相收到本应发到服务端的消息,经过多次试验,发现应该与nRF24L01的自动应答机制有关。在Mirf.cpp的setTADDR方法里可以看到,目标地址被同时写到RX_ADDR_P0和TX_ADDR这两个寄存器里,前者是接收自动应答使用的(一个nRF24L01可以有6个接收地址同时工作),导致peer发到服务端的消息也被当作自动应答了。

如何实现C51单片机和PLC之间通讯-Modbus协议是应用于电子控制器上的一种通用语言。通过此协议,控制器相互之间、控制器经由网络和其它设备之间可以通信。 Modbus协议提供了主—从原则,即仅一设备(主设备)能初始化传输(查询)。其它设备(从设备)根据主设备查询提供的数据作出相应反应。主设备查询的格式:设备地址(或广播,此时不需要回应)、功能代码、所有要发送的数据、和一错误检测域。从设备回应消息包括确认地址、功能码、任何要返回的数据、和一错误检测域。如果在消息接收过程中发生一错误,或从设备不能执行其命令,从设备将建立一错误消息并把它作为回应发送出去。
如何使用代码发布导航需要的传感器信息-在导航过程中,传感器的信息至关重要,这些传感器可以是激光雷达、摄像机、声纳、红外线、碰撞开关,但是归根结底,导航功能包要求机器人必须发布sensor_msgs/LaserScan或sensor_msgs/PointCloud格式的传感器信息,本篇将详细介绍如何使用代码发布所需要的消息。 1、ROS的消息头信息 无论是 sensor_msgs/LaserScan,还是sensor_msgs/PointCloud ,都和ROS中tf帧信息等时间相关的消息一样,带标准格式的头信息。 #Standard metadata for higher-level flow data types #sequence ID: consecuti

android 的service和activity是运行在UI主线程的。在android线程中,只有主线程即UI线程有自己的默认的消息队列。子线程需要创建自己的消息队列,并把消息

android 的service和activity是运行在UI主线程的。在android线程中,只有主线程即UI线程有自己的默认的消息队列。子线程需要创建自己的消息队列,并把消息
Android中Handle类的主要作用:1.在新启动的线程中发送给消息2.在主线程获取、处理消息为什么要用Handle这样的一个机制:因为在Android系统中UI操作并不是线

1前言传统CAN采用事件触发消息传输机制,CSMA/CD+AMP(Carrier-SenseMultipleAccesswithCollisionDetection…
