伺服驱动器是现代运动操控的重要组成部分,被广泛运用于工业机器人及数控加工中心等主动化设备中。尤其是运用于操控沟通永磁同步电机的伺服驱动器已经成为国内外研讨热门。当时沟通伺服驱动器规划中遍及选用根据矢量操控的电流、速度、方位3闭环操控算法。该算法中速度闭环规划合理与否,关于整个伺服操控体系,特别是速度操控功用的发挥起到关键作用。

伺服驱动器的基本要求
伺服进给体系的要求
1、调速规模宽
2、定位精度高
3、有满意的传动刚性和高的速度安稳性
4、快速呼应,无超调
为了保证生产率和加工质量,除了要求有较高的定位精度外,还要求有杰出的快速呼应特性,即要求盯梢指令信号的呼应要快,由于数控体系在发动、制动时,要求加、减加快度满意大,缩短进给体系的过渡进程时刻,减小概括过渡差错。
5、低速大转矩,过载才能强
一般来说,伺服驱动器具有数分钟乃至半小时内1.5倍以上的过载才能,在短时刻内能够过载4~6倍而不损坏。
6、可靠性高
要求数控机床的进给驱动体系可靠性高、作业安稳性好,具有较强的温度、湿度、振动等环境适应才能和很强的抗干扰的才能。
对电机的要求
1、从最低速到最高速电机都能平稳作业,转矩动摇要小,尤其在低速如0.1r/min或更低速时,仍有平稳的速度而无匍匐现象。
2、电机应具有大的较长时刻的过载才能,以满意低速大转矩的要求。一般直流伺服电机要求在数分钟内过载4~6倍而不损坏。
3、为了满意快速呼应的要求,电机应有较小的转动惯量和大的堵转转矩,并具有尽或许小的时刻常数和发动电压。
4、电机应能接受频频启、制动和回转。

伺服驱动器原理
现在干流的伺服驱动器均选用数字信号处理器(DSP)作为操控中心,能够完结比较复杂的操控算法,完结数字化、网络化和智能化。功率器材遍及选用以智能功率模块(IPM)为中心规划的驱动电路,IPM内部集成了驱动电路,一起具有过电压、过电流、过热、欠压等毛病检测维护电路,在主回路中还参加软发动电路,以减小发动进程对驱动器的冲击。功率驱动单元首要经过三相全桥整流电路对输入的三相电或许市电进行整流,得到相应的直流电。经过整流好的三相电或市电,再经过三相正弦PWM电压型逆变器变频来驱动三相永磁式同步沟通伺服电机。功率驱动单元的整个进程能够简略的说便是AC-DC-AC的进程。整流单元(AC-DC)首要的拓扑电路是三相全桥不控整流电路。
跟着伺服体系的大规模运用,伺服驱动器运用、伺服驱动器调试、伺服驱动器修理都是伺服驱动器在当今比较重要的技能课题,越来越多工控技能服务商对伺服驱动器进行了技能深层次研讨。
伺服驱动器是现代运动操控的重要组成部分,被广泛运用于工业机器人及数控加工中心等主动化设备中。尤其是运用于操控沟通永磁同步电机的伺服驱动器已经成为国内外研讨热门。当时沟通伺服驱动器规划中遍及选用根据矢量操控的电流、速度、方位3闭环操控算法。该算法中速度闭环规划合理与否,关于整个伺服操控体系,特别是速度操控功用的发挥起到关键作用。

伺服驱动器的相关参数设置
在主动化设备中,常常用到伺服电机,特别是方位操控,
大部分品牌的伺服电机都有方位操控功用,经过操控器宣布脉冲来操控伺服电机运转,
脉冲数对应转的视点,脉冲频率对应速度(与电子齿轮设定有关),
当一个新的体系,参数不能作业时,首要设定方位增益,保证电机无噪音情况下,尽量设大些,
转动惯量比也非常重要,可经过自学习设定的数来参阅,
然后设定速度增益和速度积分时刻,保证在低速运转时接连,方位精度受控即可。
1.方位份额增益:设定方位环调节器的份额增益。设置值越大,增益越高,刚度越大,相同频率指令脉冲条件下,方位滞后量越小。但数值太大或许会引起振动或超调。参数数值由详细的伺服体系类型和负载情况确认。
2.方位前馈增益:设定方位环的前馈增益。设定值越大时,表明在任何频率的指令脉冲下,方位滞后量越小方位环的前馈增益大,操控体系的高速呼应特性进步,但会使体系的方位不安稳,简单产生振动。不需求很高的呼应特性时,本参数一般设为0表明规模:0~100%
3.速度份额增益:设定速度调节器的份额增益。设置值越大,增益越高,刚度越大。参数数值根据详细的伺服驱动体系类型和负载值情况确认。一般情况下,负载惯量越大,设定值越大。在体系不产生振动的条件下,尽量设定较大的值。
4.速度积分时刻常数:设定速度调节器的积分时刻常数。设置值越小,积分速度越快。参数数值根据详细的伺服驱动体系类型和负载情况确认。一般情况下,负载惯量越大,设定值越大。在体系不产生振动的条件下,尽量设定较小的值。www.diangon.com
5.速度反应滤波因子:设定速度反应低通滤波器特性。数值越大,截止频率越低,电机产生的噪音越小。假如负载惯量很大,能够恰当减小设定值。数值太大,形成呼应变慢,或许会引起振动。数值越小,截止频率越高,速度反应呼应越快。假如需求较高的速度呼应,能够恰当减小设定值。
6.最大输出转矩设置:设置伺服驱动器的内部转矩约束值。设置值是额外转矩的百分比,任何时候,这个约束都有用定位完结规模设定方位操控办法下定位完结脉冲规模。本参数供给了方位操控办法下驱动器判别是否完结定位的根据,当方位误差计数器内的剩下脉冲数小于或等于本参数设定值时,驱动器以为定位已完结,到位开关信号为 ON,否则为OFF。
在方位操控办法时,输出方位定位完结信号,加减速时刻常数设置值是表明电机从0~2000r/min的加快时刻或从2000~0r/min的减速时刻。加减速特性是线性的抵达速度规模设置抵达速度在非方位操控办法下,假如伺服电机速度超越本设定值,则速度抵达开关信号为ON,否则为 OFF。在方位操控办法下,不必此参数。与旋转方向无关。
7.手动调整增益参数
调整速度份额增益KVP值。当伺服体系安装完后,有必要调整参数,使体系安稳旋转。首要调整速度份额增益KVP值.调整之前有必要把积分增益KVI及微分增益KVD调整至零,然后将KVP值逐步加大;一起调查伺服电机中止时足否产生振动,而且以手动办法调整KVP参数,调查旋转速度是否显着忽快忽慢.KVP值加大到产生以上现象时,有必要将KVP值往回调小,使振动消除、旋转速度安稳。此刻的KVP值即开始确认的参数值。如有必要,经KⅥ和KVD调整后,可再作重复批改以到达抱负值。
调整积分增益KⅥ值。将积分增益KVI值逐步加大,使积分效应逐步产生。由前述对积分操控的介绍可看出,KVP值合作积分效应增加到临界值后将产生振动而不安稳,好像KVP值相同,将KVI值往回调小,使振动消除、旋转速度安稳。此刻的KVI值即开始确认的参数值。
调整微分增益KVD值。微分增益首要意图是使速度旋转平稳,下降超调量。因而,将KVD值逐步加大可改进速度安稳性。
调整方位份额增益KPP值。假如KPP值调整过大,伺服电机定位时将产生电机定位超调量过大,形成不安稳现象。此刻,有必要调小KPP值,下降超调量及避开不安稳区;但也不能调整太小,使定位功率下降。因而,调整时应当心合作。
8.主动调整增益参数
现代伺服驱动器均已微计算机化,大部分供给主动增益调整( autotuning)的功用,可敷衍大都负载情况。在参数调整时,可先运用主动参数调整功用,必要时再手动调整。
事实上,主动增益调整也有选项设置,一般将操控呼应分为几个等级,如高呼应、中呼应、低呼应,用户可根据实践需求进行设置。

伺服驱动器频带宽度的测验
驱动器输入正弦波转速指令,其幅值为额外转速指令值的0.01倍,频率由1Hz逐步升高,记载电动机对应的转速曲线,跟着指令正弦波频率的进步,电动机转速的波形曲线对指令正弦波曲线的相位滞后逐步增大,而幅值逐步减小。测取相位滞后增大至90°时的频率作为90°相移的频带宽度;幅值减小至1/√2倍的频率作为-3dB频带宽度,以先到达的条件为准。
下文对该测验办法进行相关解说,为了便利描绘,将该规范简称为《通用技能条件》。
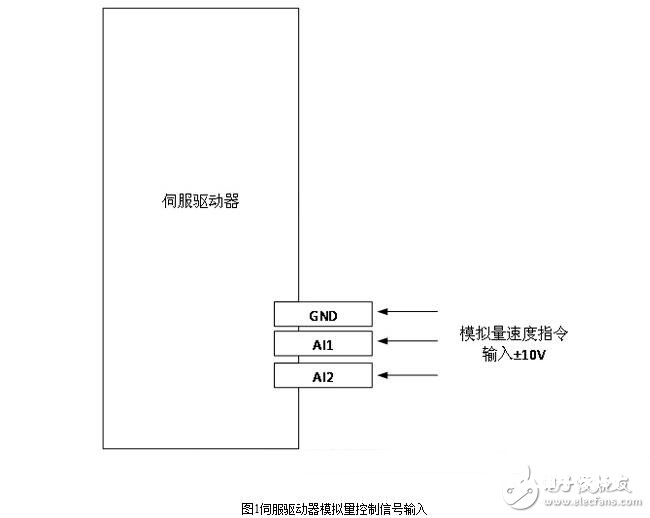
伺服驱动器的操控信号端子中,有1~2个模仿电压信号指令输入端子,用于转速或转矩指令的外部输入,在习惯上常称为“伺服驱动器的AD端口”。一般转速指令为幅值±10V的正弦波信号。如图1所示。
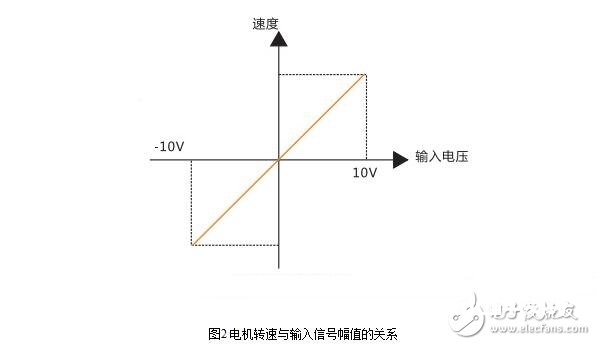
假如伺服驱动器对输入指令不设置阈值(电压死区),抱负情况下,+10V对应电机正转的额外速度,-10V则对应电机回转的额外速度,指令电压幅值的改变,电机转速也随之线性改变,如图2所示。
《通用技能条件》:“驱动器输入正弦波转速指令,其幅值为额外转速指令值的0.01倍”。
假定转速指令幅值为±10V,而且电机的额外转速为6000RPM,即当输入幅值为0.1V的正弦波电压信号,此刻伺服电机的转速为60RPM。
《通用技能条件》:“频率由1Hz逐步升高,记载电动机对应的转速曲线”
正弦波频率由1Hz逐步升高,如图3所示。
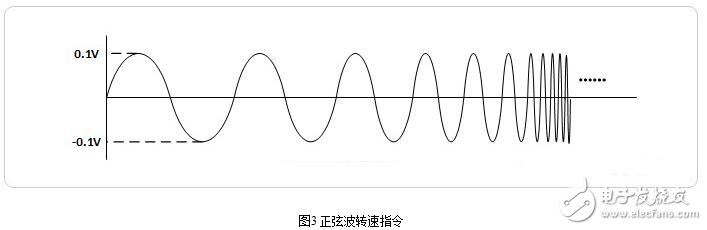
在该指令的操控下,伺服电机进行以正向加快——正向减速——反向加快——反向减速四个运动为一个周期的动作,正弦波指令信号在必定的频率时,伺服电机的最高转速为60RPM,跟着指令正弦波频率的进步,电动机转速的波形曲线对指令正弦波曲线的相位滞后逐步增大,而幅值逐步减小。
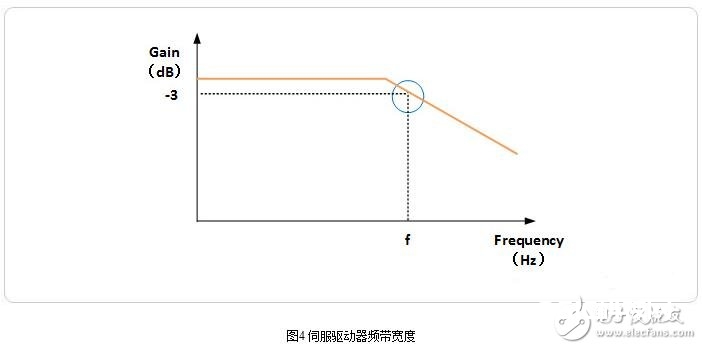
《通用技能条件》:“测取相位滞后增大至90°时的频率作为90°相移的频带宽度;幅值减小至1/√2倍的频率作为-3dB频带宽度,以先到达的条件为准。”
以幅值频率曲线为例,如图4所示。此刻频率f为伺服驱动器的频带宽度。