


1 导言
现在天文望远镜常用的传动办法首要为蜗轮蜗杆传动、齿轮传动、冲突传动、和直接驱动等办法。这儿选用直接驱动式望远镜机架,选用组合式弧线沟通PMSM。直接驱动将电机与负载直接耦合在一同,进步了体系牢靠性,但对电机自身运转平稳性及超低速提出了更高的要求。
电流环在伺服驱动体系中占有重要方位,直接决议伺服体系的好坏,许多文献都对电流采样进行了研讨。电流环是望远镜驱动操控体系的内环,电流采样的精度和速度直接影响整个电流环的运算精度,然后对望远镜机架驱动盯梢功能发生严重影响,电流环的规划是确保望远镜盯梢方针的速度精度及力矩平稳性的要害部分。在此规划了依据单电源供电的电流采样电路,并选用TMS320F2812完成电流采样环节的A/D转化,为后续操控器的规划供给了便利。
2 机架驱动电流采样电路规划
选用弧线沟通PMSM,定子直径为2.5 m,转子直径为2.2 m,15组定子单元,60对极的磁极组成转子,每组定子单元与4对极的转子组成一台弧线型沟通PMSM,共由15组单元电机组成。其间恣意一台单元电机可独立作业,也可和其间的几台电机一同作业。2.5 m直接驱动电机可驱动口径为4 m的望远镜。电机参数:额外功率3 kW;额外电压380 V;额外电流12 A;额外频率0.533 Hz;转动惯量262.74kg·m2;额外转速4 r·min-1;定子电阻33 Ω;极对数为60。
现在常用的操控器有单片机、ARM及DSP等数字体系。电机输出的电流是模拟信号,在此选取TMS320F2812完成A/D转化,电流采样电路是单电源供电的TLV2374。依据电机参数,电流传感器选用LTS25-NP。
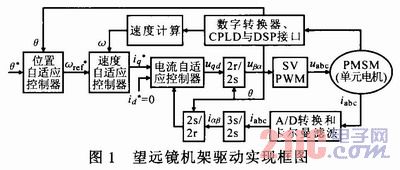
2.1 望远镜机架驱动完成总框图
所规划的电流检测电路将弧线沟通PMSM的三相定子电流经电流传感器后进入DSP的A/D口,将其转化为数字信号,便于操控器及逆变器信号的处理。因为弧线电机的定子绕组选用Y接法,则有ic=ia+ib,因而只需要检测其间两相电流,即可得到三相电流。沟通PMSM要想完成高功能的闭环操控,电流反应环节必不可少,只要检测出定子绕组的电流,才干为逆变环节即SVPWM算法的完成供给根底。由PMSM作业原理可知,定子电流检测的精度和实时性是决议整个矢量操控体系精度的要害。
关于精细弧线电机,驱动望远镜时,闭环才是确保盯梢方针和图画质量的首选操控办法,能完成高精度、高功能的传动和伺服操控。别的,一个完善牢靠的驱动体系在硬件上包含过压、欠压、过流维护等各类毛病检测和维护电路,这些电路均需检测电机的电压和电流信号。弧线沟通PMSM的驱动体系由方位环、速度环、电流环组成,图1示出望远镜机架驱动完成总框图。
2.2 TLV2374电流采样电路规划
TLV2374器材是单电源供电运算扩大器,具有轨对轨的输入输出才干,最低操作供电电压至2.7 V,轨对轨的摆幅输出特性,可供给3 MHz的带宽,仅需550μA的作业电流,最大作业电压可达16 V。通过长期的研讨及试验,这儿给出单电源供电的电流采样体系的详细规划进程。
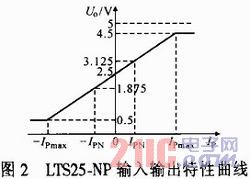
体系选用的电流传感器IXS25-NP是闭环原理的传感器,5 V单电源供电,使外围的硬件电路规划更简略,无需添加电压抬升电路,然后削减了电源对体系的搅扰。该电流传感器温漂小,精度高,采样电阻是内置式的,为电压型输出,避免了出现因添加外接采样电阻及运放后进入DSP使精度有所下降的状况,输出特性曲线如图2所示。
电流传感器的接法共有3种,按其间一种接法,电流传感器的输出电压规模是1.9~3.1 V,该规模的电压不能直接送入到DSP的A/D(0~3 V)进行转化,且电压规模过小,必定下降A/D转化器的转化精度,为充分利用A/D转化器,在此依据实践A/D转化成果,规划了电流采样电路,将满量程时信号的输出规模调整到0~2.8 V,试验证明超越2.8 V将导致有时输出是饱和状态,为防备电路在非正常状况下损坏DSP的A/D接口,电路中添加了限幅电路。设采样电路输入为Uin,规模是1.9~3.1 V,采样电路的输出为Uo,规模是0~2.8 V,设输入输出为线性联系,则有:
Uo=AUin+B (1)
依据输入输出之间的联系,计算出A=7/3和B=-133/30,即:
Uo=7Uin/3-133/30 (2)
由式(2)知输入输出的本质是由运放构成的减法电路,规划出单电源运放组成的减法电路即可。因为TLV2374是单电源供电,可知其供电电压正电源是5 V,负电源是2.5 V,在此选用电压基准芯片并调整得到2.5 V基准电压,若设电流传感器的输出为Uin1,2.5 V基准电压为Uin2,则有:
Uo=7Uin1/3-133Uin2/75 (3)
挑选适宜的电阻完成该采样电路。图3为电流传感器的检测采样电路,共有4级处理:第1级进行阻抗改换;第2级是二阶有源滤波电路;第3和第4级是上式算出的减法电路,其间,为确保输入输出为式(3)的联系,有意在份额电路部分放置了两个1/1 000的精细可调电阻来调理输入输出的线性联系。需留意在运用单电源供电的运放时,份额增益都是相对同相端的电压而言。
实践调试中,因为经传感器出来的电流信号有高次谐波及其他搅扰信号,因而必需规划硬件滤波器进行按捺,该体系规划的二阶低通滤波器的电流检测电路坐落上述状况中的第2级,在此考虑到精细弧线电机的超低速,所规划低通滤波器的截止频率为10 Hz,留意电容值的选取,反相端电容通常是同相端%&&&&&%的2倍,电流采样电路详细完成如图3所示。

3 A/D校对及电流采样试验成果
TMS320F2812自带一个12位带流水线的ADC,而A/D转化的精度直接决议操控体系功能的好坏,如芯片内部A/D转化、A/D转化的增益和偏移都能影响ADC终究成果,这些对运用者而言都已无法改动,用户在运用进程中可通过修正外围硬件规划削减输入差错、调理芯片参数削减输入和转化差错、软件滤波削减输出差错及软件校对进步其转化精度。TMS320F2812的ADC转化精度较差的首要原因是存在增益和偏移差错,要进步转化精度就有必要对这两种差错进行补偿。

12位的A/D所能表明的数据规模是(0000H~0FFFH),即0~4 095,为充分发挥DSP 16位的特性,将转化成果放在(0000H—FFF0H),即0~65 520。前面现已说到,A/D成果寄存器的值是单极性的数据,而在后续的操控处理程序中,要求转化成果是双极性的数据,关于这种状况,在进行转化时就将其转化成双极性数据。图4为实践采样时抱负增益与实践增益模拟量与数字量之间的联系曲线。图中横轴是实践电压,纵轴是转化的数字量,存储在成果寄存器中,实践与抱负状况比较存在增益和偏移差错,有必要对其校对才干进步其转化精度。依据上述描绘,首要编写出校对增益和偏移量的程序,然后用来校对TMS320F2812的其他通道,A/D电流采样总流程如图5所示。
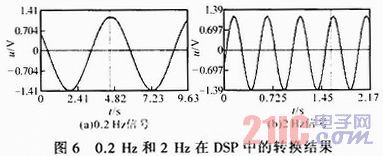
输出的电流因为不可避免地含有噪声,在A/D转化前还有必要进行数字滤波,电流采样滤波选用扩展的卡尔曼滤波办法预算实时电流最优化,以进步瞬间电流测验的精度,取得正弦特性的旋转磁场,使PMSM在超低速运转时更平稳。在运用DSP进行A/D转化时,为了进步转化精度,选用校对的办法选取两个基准电压,在此选取0.5 V和2.5 V。基准电压都由上述电压基准芯片供给,校对电路中运用DSP的A/D通道,软件处理使0~.8 V单极性信号直接转化到-1.4~1.4 V的双极性信号,便利了电流环节的信号处理。选取频率为0.2 Hz与2 Hz的信号比较较,两者的转化成果如图6所示,图中横坐标是转化信号的周期,纵坐标是电流信号经传感器后扩大电路处理后的电压值。由图可见,硬件电路和软件算法都很好地完成了电流信号的转化。依据试验记载可知,有源滤波电路的截止频率也影响转化成果,假如望远镜的转速很低,在实践运用进程中要考虑下降二阶低通有源滤波器的截止频率。
4 定论
鉴于运用的电机是特别定制的直径2.5 m的组合式弧线沟通永磁同步电机,市场上现有的驱动板不能使其正常运转。考虑到驱动体系的复杂性,应尽量简化电路,因而选用单电源供电的运算扩大器完成电流采样电路,而且电流采样的精度直接决议了望远镜机架运转的稳定性,从而影响望远镜的盯梢和观测质量,因而该电流采样电路的精度要求较高。






