


这是一个很简略的机器人,运用一个简略的开关作为传感器,运用倒竖摆的机制站站在两个轮子上。
当机器人要倒下的时分,马达就启动了,使机器人向它即将倒下的方向移动。电动机转矩的重心高于马达而使机器人坚持平衡。

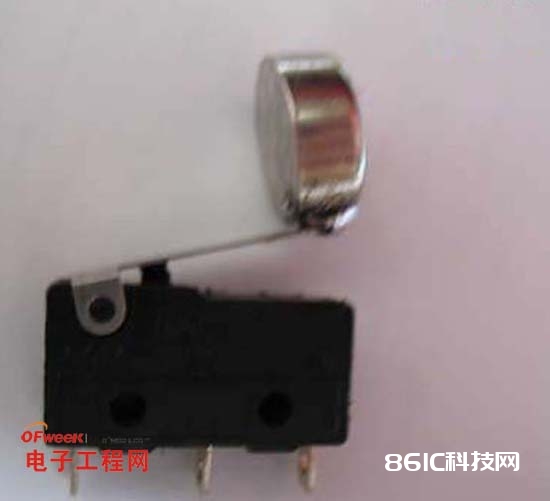
▲简易平衡机器人
第一步:所需资料:
你需求以下的设备来完结简易平衡机器人:
1、小的电机;(能够把你的四驱车拆了)

2、一些齿轮(我想你的四驱车仍是不能逃过)
3、一根轴(你就抛弃吧,肯定是拆了你的四驱车了)

4、两个轮子(……)
5、一些塑料片,用来做机器人的轴承套和脖子(脖子,那权且就这么翻吧)

6、2个电池盒(2节一组的那种)

7、一些电线

8、一个扣子电池
9、一个带金属杠杆的单刀双掷开关
10、一个拨动开关
11、一枚钉子
12、烙铁
13、胶水
第二步:
在这一步要害便是要把电机和轴、轮子衔接起来,你能够运用上述资料里预备的齿轮、电机、轮子等用你想到的任何办法把他们有机的组合起来,各自发挥吧,或许你也能够用减速电机完结,你怎样完结它并不要害,要害是完结它就对了。



第三步:衔接机器人的脖子和头
把塑料片用胶水固定到电机上,然后在塑料片的两头别离涂上胶水,把电池盒粘在最高处。(好吧,电池盒和电机之间这段的塑料片就叫做脖子了)


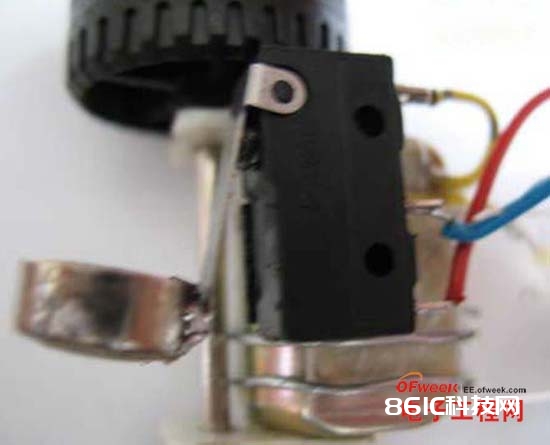
第四步:装置传感器
把扣子电池焊接到微动开关上。把钉子放在火上加热,穿过塑料片,然后把这个微动开关用胶水粘在这个钉子上。留意钉子的方位,要确保扣子电池能正好碰到地上,这很要害。(这个方位的确认很要害,记住确保机器人垂直于平面)这是这个机器人成功与否的要害。

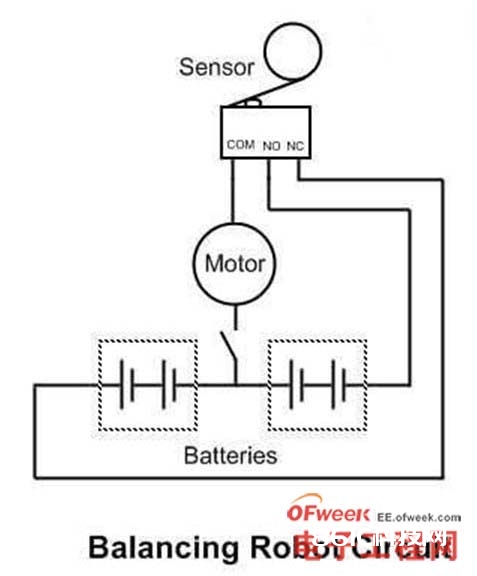
第五步:衔接开关
在电池盒的一段连上一根线,作为正极,另一端连拨动开关,拨动开关在连一根线,作为负极,然后与马达相连。


第六步:连线
你的连线有必要使机器人向它要倒下的方向移动。
第七步:测验
装上电池,让咱们看看它是否正常作业吧。调整微动开关的方位,让它作业的更好。假如颠倒了,那就替换一下正负极的电线。

跋文:
这个平衡机器人适当的“粗陋”,可是却是不普通的,首要它用简略的办法完成了倒钟摆的平衡,尽管时刻不久,但就其原理来说却是全部平衡机器人的根底,别的它也说明晰自动操控的一种重要的操控办法,反应,闭环反应,这可能对刚刚触摸机器人或许说其他自动操控系统的人的风趣的教育形式;其次,它告知咱们一个现实,人类的想象力是惊人的,也让咱们反思,有许多的时分咱们用很杂乱的办法却来处理很简略的问题,相同却有人用简略的办法来处理杂乱的问题。
我想或许有许多人并不屑这个机器人的制造,可是关于刚刚触摸机器人的朋友来说,这确实是个很好的机器人,风趣,并且制造起来不困难。






