介绍了一种依据fpga的多轴操控器,操控器首要由arm7(LPC2214)和fpga(EP2C5T144C8)及其外围电路组成,用于一起操控多路电机的运动。运用Verilog HDL硬件描绘言语在fpga中完结了电机操控逻辑,首要包含脉冲操控信号发生、加减速操控、编码器反应信号的辨向和细分、肯定位移记载、限位信号维护逻辑等。论文中给出了fpga内部一些中心逻辑单元的完结,并运用QuartusⅡ、Modelsim SE软件对要害逻辑及时序进行了仿真。实际运用标明该操控器能够很好操控多轴电机的运动,而且能够完结高精度地方位操控。
跟着电机广泛地应用于数字操控体系中,对电机操控的实时性和精度上的要求越来越高。怎么灵敏、有用地操控电机的运转成为研讨的首要方向。文中选用现场可编程逻辑门阵列(Field Programmable Gate Array,fpga),经过Verilog言语编程来完结电机的操控。运用fpga规划具有硬件规划软件化、高度集成化、高作业频率等长处。fpga最大的特色便是灵敏,完结你想完结的任何数字电路,能够定制各种电路,削减受制于专用芯片的捆绑,真正为自己的产品量身定做。在规划的进程中能够灵敏的更改规划,而且它强壮的逻辑资源和寄存器资源能够让你轻松的去发挥规划理念。其并行履行,硬件完结的办法能够应对规划中很多的高速电子线路规划需求。
1 多轴操控器首要功用
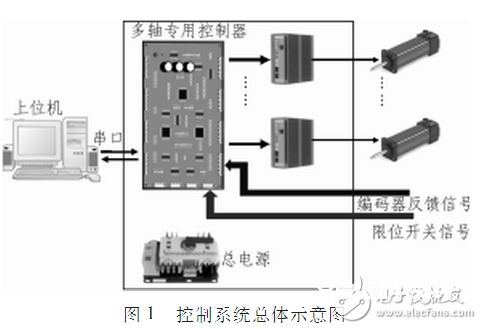
多轴操控器与上位机、电机驱动器等合作运用,图1为选用多轴操控器组成的操控体系全体示意图。操控器接纳上位机发送的操控指令,剖析处理并发生相应的方向信号、脉冲信号给驱动器,然后到达操控电机运转的意图。为了进步体系的操控精度,将电机的编码器信号作为反应信号输入给操控器(内部完结主动辨向及四细分)。在各轴运动进程中,专用操控器对电机运转的肯定位移进行记载,而且能够实时地将各轴的肯定方位信息上传给上位机。另外在电机运转的进程中,为了确保电机运转的安全性,操控器还选用了限位信号反应完结全硬件维护措施。
2 多轴操控器组成
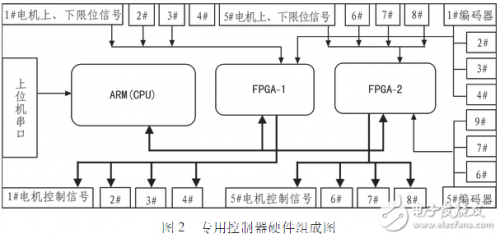
专用操控器由arm(LPC2214)、fpga(EP2C5T144C8)、驱动器接口电路、编码器接口电路、限位检测电路和电源电路等组成,如图2为一个八轴电机操控器的硬件组成图。arm经过串口完结与上位机之间的通讯,解析从上位机取得的操控指令,并经过fpga发生相应输出信号给驱动器接口,驱动器接口外接驱动器。编码器信号作为方位反应信号同编码器接口相连,构成方位环反应。限位信号作为安全检测信号同限位检测接口相连,为整个体系增加一道安全保证。
3 fpga操控逻辑
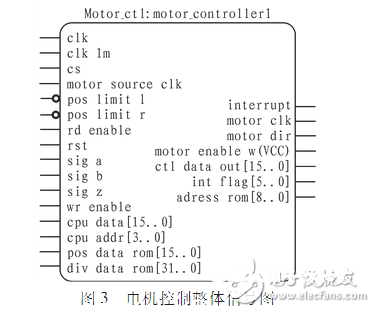
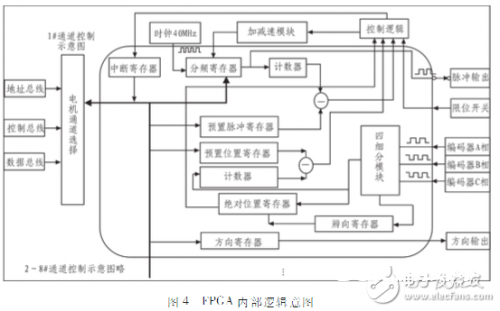
专用操控器在完结整个操控的进程中,arm只担任指令解析、操控指令发送、实时数据上传等使命,fpga才是多轴专用操控器的中心。经过Verilog HDL言语在fpga内部完结了加减速曲线、编码器信号辩向及四细分、肯定位移记载等功用。图3为电机操控的全体输入、输出信号图,经过片选信号CS、读有用信号rd_enable、写有用图信号wr_enable进行电机通道挑选。图4给出了1#通道操控的fpga内部逻辑示意图,下面将逐个对各首要模块进行具体介绍。
1)加减速曲线模块
为了更有用、更理想地操控电机的运转,在fpga内部规划了加减速曲线模块。文中选用了一种近似指数加减速曲线的办法,如图5为近似指数加快曲线,减速曲线与之对称。速度等距散布,那么在该速度级上坚持的时刻不一样场。为了简化,用速度级数N与一个常数C的乘积去模仿而且坚持的时刻用不熟来替代。因而,速度每升一级,电机都要在该速度级上走NC步(其间N为该速度级数)。
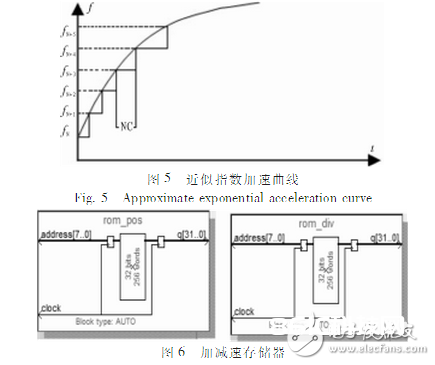
树立两个名为rom_pos、rom_div的ROM模块,如图6所示,rom_pos为脉冲个数存储器,rom_div为分频值存储器。经过相同的地址线将两个存储器连接起来,使一个地址对应一组脉冲个数和分频值。
fpga取得方向信号、脉冲(间隔)信号、方针分频值之后.假如电机运转进程中不需求加减速,直接以方针分频值操控脉冲信号的发送即可。假如需求履行加减速,则fpga内部要调用加减速模块。依据地址线获取一组数据,即脉冲个数pul_cnt和分频值div_num,以div_num巨细的分频值发送pul_cnt个脉冲,然后再依照下一组数据值发送脉冲,直到分频值到达方针分频值停止,减速进程与加快进程对称。当电机依照脉冲(间隔)信号运转到一半行程的时分,假如分频值还未到达方针分频值,此刻就要进行强制减速。
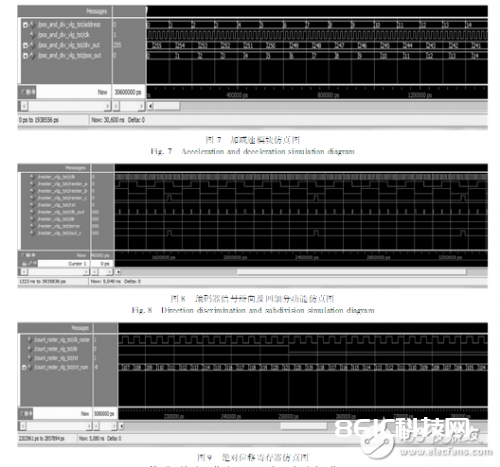
编写仿真程序,使两个存储器地址线相同,对存储器地址address做加1运算,然后可一次性读取两个存储器所对应存储单元的数据。运用Modulesim仿真东西对加减速模块进行功用仿真,仿真成果如图7所示,拜访一个存储器地址就对应着一组脉冲个数和分频值的输出。
2)编码器反应辨向及四细分
编码器反应信号由A、B、Z三信任号组成。A、B两信任号相位相差90度,一个周期内A、B信任号会呈现4种不同的组合状况,依据这一特征能够对编码器信号进行辩相和四细分处理。Z信任号为编码器零位信号,当编码器旋转一圈,Z相就会有信号输出。
在QuartusⅡ编译环境下成功编译之后,调用Modulesim仿真软件,编写仿真程序,使之发生大局时钟、复位信号、相位差为90度的A、B信任号和Z信任号。如图8所示,给出了该多轴操控器中所选用的编码器信号辩相及四细分的功用仿真图。
3)肯定位移记载
多轴专用操控器能够将电机运转的肯定位移实时地上传给上位机,这一功用的完结就有赖于fpga中的肯定位移记载部分的逻辑功用。在fpga内部设置一个肯定位移寄存器,用来对编码器反应信号(辨向四细分之后)进行计数运算。当编码器信号的一个脉冲到来时,依据辩向后的方向信号做不同的运算处理。方向为正则肯定位移寄存器的值就进行加1运算,不然进行减1运算,然后到达对肯定位移进行记载的意图。而且arm能够随时读取该肯定位移寄存器的值,然后将其值上传给上位机,然后完结实时上传电机运转方位信息的功用。编写仿真程序对肯定位移寄存器进行功用仿真,成果如图9所示。
4 结束语
该计划成功已应用于某6轴Stewart渠道运动操控中,在完结了0.1μm的运动定位精度的一起,运动组织得到了很好的维护,屡次试验及实际运用中,该专用操控器运转安全可靠。