HyperWorks是罕见的能直接读取CATIA及其它3D模型的有限元剖析软件之一。其HyperMesh模块具有强壮的前处理功用,能够很迅速地读取结构杂乱、部件多、规划大的数据模型;在几许整理、处理功率和网格质量操控方面更是具有其它软件无法比拟的优势。因而,本文挑选HyperMesh进行前处理树立驱动桥的有限元模型,然后导入有限元求解器中进行运算。
1 有限元模型的树立
1.1 网格区分
将后驱动桥的CATIA模型导入HyperMesh中,依据核算需求进行适度的几许整理,去除一些不影响核算成果的特征。网格的区分尽量选用六面体,因为六面体单元与四面体单元比较既能缩短核算时刻又能进步核算精度,故将除差速器壳和主减速器壳外的其它零件悉数选用六面体单元进行网格区分,且网格巨细操控在3mm左右;一起,在网格区分的过程中随时进行网格质量查看及网格间容差的查看,以确保网格的质量。各要害部件的模型如图1所示。

图1 后驱动桥有限元模型
1.2 资料特点
树立好的有限元模型导入有限元求解器中,进行资料参数的界说,首要部件的资料特点如表1所示。
表1 首要部件的资料特点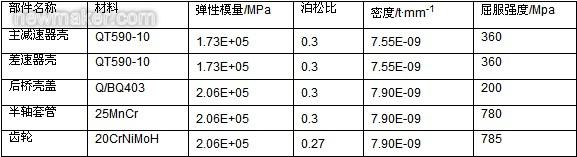
2载荷及边界条件
2.1 束缚
依据实践工况,束缚两板簧座上外表节点X、Z方向上的平动和绕Y轴的滚动,主减速器壳前端Y、Z方向上的平动及绕X轴的滚动。
2.2 加载
参照轿车行业标准QC/T 533-1999的实验加载条件,将实验加载条件换算到本驱动桥上,输入端的端面上施加1534r/min的转速;在左、右轮毂端面上各加载42N·m的反向转矩。施加状况如图2、图3所示:

图2 转速施加状况

图3 转矩施加状况
所施加的转速和扭矩初始都是突变的,首要是为了防止初始啮合冲击过大形成齿间震动、触摸不收敛。
2.3 触摸界说
依据各零部件实践的衔接状况,将主被齿、主齿与轴承、主齿与主减速壳、半轴与轴承、轴承内外圈与轴承滚子之间等的衔接悉数设置为面面触摸,合计28个面面触摸对,其他则界说为刚性衔接。主被齿之间的触摸联系如图4:

图4 主被齿触摸对
3 核算成果
3.1 模态剖析成果
后驱动桥有限元核算和模态实验成果比照如表2:
表2 有限元束缚模态核算成果与模态实验成果
由表2能够看出:有限元剖析的一阶模态频率稍高,与实车束缚模态比较差错为10.6%。这是因为有限元剖析束缚某方向的运动时便是彻底固定的,与实践状况比较会添加体系的刚度;且后桥内部各触摸件之间的衔接选用的是绑定束缚,也添加了体系的刚度,故一阶频率会稍高,但在答应的差错范围内。因而,该驱动桥的有限元剖析是较为精准的。