主动操控体系是指用一些主动操控设备,对出产中某些关键性参数进行主动操控,使它们在遭到外界搅扰(扰动) 的影响而违背正常状况时,能够被主动地调理而回到工艺所要求的数值范围内。出产进程中各种工艺条件不或许是原封不动的。特别是化工出产,大多数是连续性出产,各设备彼此相关,当其间某一设备的工艺条件发生变化时,都或许引起其他设备中某些参数或多或少地动摇,违背了正常的工艺条件。当然主动调理是指不需要人的直接参与。
原理:对出产中某些关键性参数进行主动操控,使它们在遭到外界搅扰(扰动) 的影响而违背正常状况时,能够被主动地调理而回到工艺所要求的数值范围内。主动操控体系分为开环和闭环,详细为:
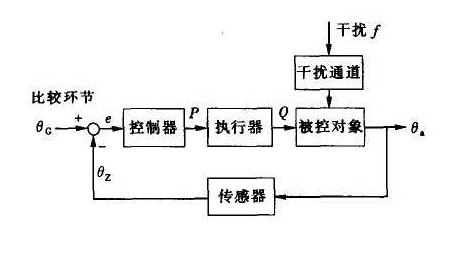
闭环主动操控体系原理:闭环操控也便是(负)反应操控,原理与人和动物的意图性行为类似,体系组成包含传感器(相当于感官),操控设备(相当于脑和神经),执行组织(相当于手腿和肌肉)。传感器检测被控目标的状况信息(输出量),并将其转变成物理(电)信号传给操控设备。操控设备比较被控目标当时状况(输出量)对期望状况(给定量)的误差,发生一个操控信号,经过执行组织驱动被控目标运动,使其运动状况挨近期望状况。
开环主动操控体系原理:依照事前确定好的程序,顺次宣布信号去操控目标。按信号发生的条件,开环操控有时限操控,次第操控,条件操控。20世纪80年代以来,用微电子技术出产的可编程序操控器在工业操控(电梯,多工步机床,自来水厂)中得到广泛应用。当然,一些杂乱体系或进程常常归纳运用多种操控类型和多类操控程序。
原理:
主动操控(原理)是指在没有人直接参与的情况下,使用外加的设备或设备(称操控设备或操控器),使机器、设备或出产进程(总称被控目标)的某个作业状况或参数(即被操控量)主动地依照预订的规则运转。
主动操控体系
为了完成各种杂乱的操控使命,首先要将被操控目标和操控设备依照必定的办法连接起来,组成一个有机的全体,这便是主动操控体系。在主动操控体系中,被控目标的输出量即被控量是要求严厉加以操控的物理量,它能够要求坚持为某一稳定值,例如温度、压力或飞翔轨道等;而操控设备则是对被控目标施加操控效果的相关组织的整体,它能够选用不同的原理和办法对被控目标进行操控,但最基本的一种是根据反应操控原理的反应操控体系。
反应操控体系
在反应操控体系中,操控设备对被控设备施加的操控效果,是取自被控量的反应信息,用来不断批改被控量和操控量之间的误差然后完成对被控量进行操控的使命,这便是反应操控的原理。
下面是一个规范的反应模型:
开方:
公式:X(n+1)=Xn+(A/Xn^2-Xn)1/3设A=5,开3次方
5介于1^3至2^3之间(1的3次方=1,2的3次方=8)
X_0能够取1.1,1.2,1.3,1.4,1.5,1.6,1.7,1.8,1.9,2.0都能够。例如咱们取2.0。依照公式:
第一步:X1={2.0+[5/(2.0^2-2.0]1/3=1.7.}。即5/2×2=1.25,1.25-2=-0.75,0.75×1/3=0.25,输入值大于输出值,负反应
2-0.25=1.75,取2位数字,即1.7。
第二步:X2={1.7+[5/(1.7^2-1.7]1/3=1.71}。。
即5/1.7×1.7=1.73010,1.73-1.7=0.03,0.03×1/3=0.01,输入值小于输出值正反应
1.7+0.01=1.71。取3位数字,比前面多取一位数字。
第三步:X3={1.71+[5/(1.71^2-1.71]1/3=1.709} 输入值大于输出值,负反应
第四步:X4={1.709+[5/(1.709^2-1.709]1/3=1.7099} 输入值小于输出值正反应
这种办法能够主动调理,第一步与第三步取值偏大,可是计算出来今后输出值会主动减小;第二步,第四步输入值偏小,输出值主动增大。X4=1.7099.
当然也能够取1.1,1.2,1.3,……1.8,1.9中的任何一个。
一起,主动操控原理也是高等院校主动化专业的一门主干课程,是学习后续专业课的重要根底,也是主动化专业硕士研究生入学考试必考的课程。