0 导言
倒竖摆作为一种典型的操控体系实验设备,具有非线性、天然不安稳等特性,常用来作为查验某种操控理论或办法是否合理的典型计划。一阶倒竖摆体系能用多种理论和办法来完成其安稳操控,如PID、自适应、状况反应、含糊操控及人工神经元网络等多种理论和办法都能在倒竖摆体系操控上得到完成。
1体系构成及作业原理
图1为一阶旋转倒竖摆结构示意图。直流电机作为仅有的动力设备,与旋臂坚持刚性衔接,带动旋臂在水平面内旋转,旋臂的一端通过转轴(本体系选用电位器视点传感器)与摆杆衔接,摆杆可做垂直于旋臂的圆周运动。在天然状况下,摆杆为竖直下垂状况。倒竖摆操控的意图是通过操控直流电动机的运动状况,使摆杆坚持倒竖状况。
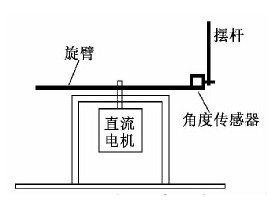
图1倒竖摆结构示意图
体系作业原理如下:摆杆摇摆时,视点传感器检测摆杆的视点,依据视点传感器的输出特性,其输出电压经A/D转化器转化成电压数字量,该数字量与希望的值进行比较发生差错,通过单片机对该差错进行处理,即PID操控运算,依据运算成果发生操控信号操控电机和旋臂的滚动,使摆杆的视点与希望的视点更挨近。
倒竖摆操控体系结构框图如图2所示,单片机(51单片机)为操控器,直流电机为执行器,倒竖摆为被控目标,倒竖摆视点为被控量,视点传感器和模数转化器构成反应回路。
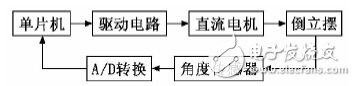
图2倒竖摆操控体系结构框图
2 倒竖摆操控体系的硬件规划
2.1单片机最小体系
该体系中选用了STC90C51单片机,该型单片机
具有以下特色:①八位MCU核,与传统8051兼容;②大容量存储空间,包含64kB程序空间,1280B
SRAM等;③具有4个八位并行I/O口,3个守时/计数器,2个外部中止源和1个全双工UART传输口;④5V供电时,最高支撑80MHz振动频率,具有高速浮点运算才干,合适倒竖摆体系等较为杂乱的操控体系运用。51单片机最小体系如图3所示。
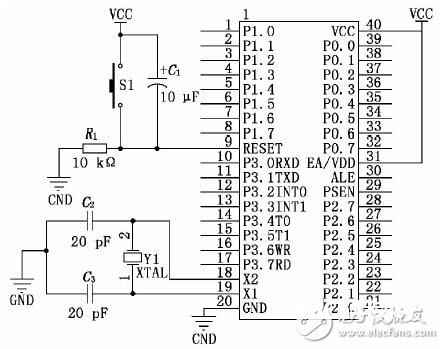
图3 51单片机最小体系
2.2摆杆视点检测
检测摆杆视点所用到的视点传感器品种十分多,常用的有电位器式视点传感器、光电编码器、陀螺仪模块等。因为电位器式视点传感器原理简略,检测精度取决于所用A/D转化器的精度,本钱相对较低,因而,归纳多方面要求,本体系选用电位器式视点传感器。
传感器回来的电压信号无法被单片机直接辨认,所以需求通过A/D转化,将模仿电压信号转化为二进制数的方式,然后单片机才干计算出差错,从而发生相应的输出。A/D转化器常用的有8位和12位输出,在本体系中选用8位A/D转化器即可满意操控要求,其类型选用ADC0809,相应电路原理图见图4。
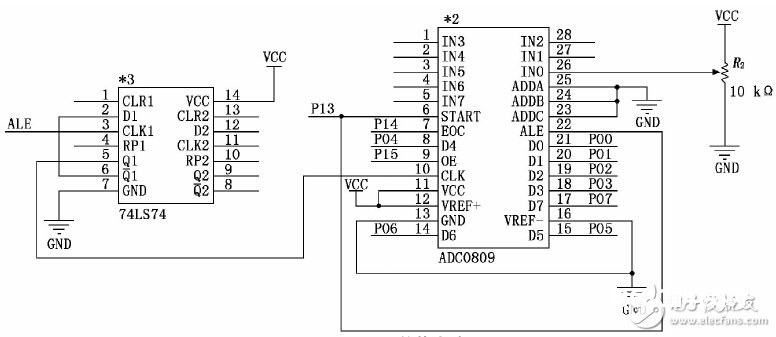
图4 A/D转化电路
A/D转化器的时钟脉冲为单片机ALE引脚输出的脉冲经74LS74芯片分频之后得到,A/D转化器的8位数字信号通过单片机的P0口进行收集与处理。
2.3驱动电路
本体系选用的直流电机额外电压为24V,额外功率为30W,单片机的I/O口不足以供给如此大的驱动才干,故需选用驱动电路。常用的直流电机驱动芯片为L298N,可驱动两路直流电机,最大驱动电压为46V,最大电流2A~3A,满意规划要求。直流电机驱动电路如图5所示。
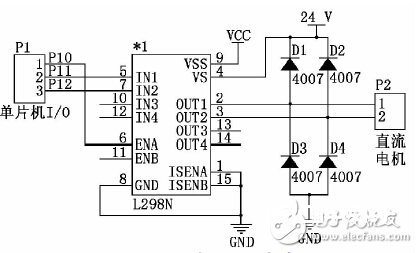
图5 直流电机驱动电路
图5中,L298N的ENA为使能端,可作为单片机PWM(脉宽调制)操控端,操控直流电机转速;IN1和IN2为信号输入端,OUT1和OUT2为输出端,输出
状况与输入状况对应,操控直流电机转向。输出端的二极管为续流二极管,起维护电动机线圈的作用。
3倒竖摆操控体系的软件规划
3.1操控算法
本体系选用PID操控算法,PID算法适用于负荷改变大、容量滞后较大、操控质量要求高的操控体系。PID算法有3个可设定参数,即份额放大系数KP、积分时间常数TI、微分时间常数TD。份额调理的作用是使调理进程趋于安稳,但会发生稳态差错;积分作用可消除被调量的稳态差错,但因为积分饱满等原因或许会使体系振动乃至使体系不安稳;微分作用能有效地减小动态差错[4]。其传递函数为:

其间:u(k)为第k个采样时间的输出;e(k)为第k个采样时间的差错值;T为采样周期;KP为份额放大系数;TI为积分时间常数;TD为微分时间常数。
在实时性要求较高的倒竖摆体系中,积分作用常常使体系对差错的调理变慢,使动态相应变慢。因而要尽量弱化或许消除积分作用,运用PD调理规则即可。在该体系中,输入变量为给定值与实践检测到视点的差值,输出变量操控所发生的PWM波形的占空比。因为旋臂、摆杆以及电动机的各项参数很难准确掌握,且搅扰较多,难以树立准确的数学模型,因而选用实验法整定参数的数值,即依据体系表现出的状况,调理各参数的数值,直至体系到达安稳。
3.2程序流程图
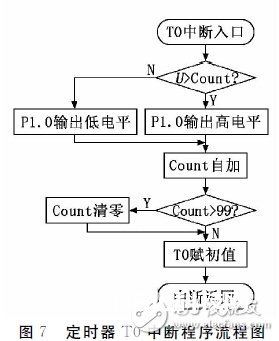
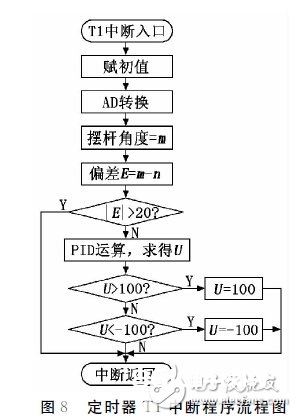
倒竖摆体系主程序流程图见图6。其间,U为PID运算的输出值,为输出PWM波形的占空比,因为所选单片机不具有专用PWM输出引脚,需求使用守时器T0模仿其波形输出,守时器T0中止子程序流程图见图7。在本体系中,采样周期挑选为10ms,由守时器T1操控,守时器T1中止子程序流程图见图8。

4体系测验
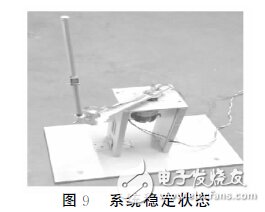
本体系测验所用到的倒竖摆模型为克己简易模型,测验进程如下:外力将摆杆拉起至挨近倒竖状况(与倒竖状况相差20°左右);给体系上电,一起撤去外力,观察到摆杆敏捷呈倒竖状况,通过几回调整,即可长期坚持倒竖状况。体系到达安稳状况的作用如图在摆杆坚持倒竖状况时,施加一扰动,即轻碰摆杆或旋臂,体系通过短时间的调整之后,仍能够主动调理至安稳状况,阐明该体系具有较强的鲁棒性。
5定论
本体系选用单片机作为一阶旋转倒竖摆体系的操控器,执行了数据收集、数据处理(PID运算)、操控直流电机运转状况等操作,成功使该体系安稳,其经济性和实用性得到了很好的展示。一起也表现了经典PID操控理论在一阶倒竖摆体系中运用时杰出的操控作用。