


0 导言
传统PID(份额、积分和微分)操控原理简略,使用便利,习惯性强,能够广泛应用于各种工业进程操控范畴。可是PID操控器也存在参数调理需求必定进程,最优参数选取比较费事的缺点,对一些体系参数会改动的进程,PID操控就无法有效地对体系进行在线操控。不能满意在体系参数产生改动时PID参数随之产生相应改动的要求,严峻的影响了操控作用。本文介绍了依据车载伺服体系的含糊PID操控,它不需求被控目标的数学模型,能够在线实时批改参数,使操控器习惯被控目标参数的任何改动。并对其进行仿真验证,成果表明含糊PID操控使体系的功用得到了显着的改进。
1 传统PID与含糊PID的比较
1.1 PID操控
PID操控器面世至今凭仗其结构简略、安稳性好、作业牢靠、调整便利等长处成为工业操控的首要技能之一。当被控目标的结构和参数不能彻底把握、得不到准确的数学模型时,选用PID操控技能最为便利。PID操控器的参数整定是操控体系规划的中心。它是依据被控进程的特性来确认PID操控器的参数巨细。PID操控原理简略、易于完成、适用面广,但PID操控器的参数整定是一件十分令人头痛的事。合理的PID参数一般由经历丰富的技能人员在线整定。在操控目标有很大的时变性和非线性的状况下,一组整定好的PID参数远远不能满意体系的要求。为此,引入了一套含糊PID操控算法。
1.2 含糊PID操控
所谓含糊PID操控器,即使用含糊逻辑算法并依据必定的含糊规矩对PID操控的份额、积分、微分系数进行实时优化,以到达较为抱负的操控作用。含糊PID操控共包含参数模糊化、含糊规矩推理、参数解含糊、PID操控器等几个重要组成部分。核算机依据所设定的输入和反应信号,核算实践方位和理论方位的差错e以及当时的差错改动ec,并依据含糊规矩进行含糊推理,最终对含糊参数进行解含糊,输出PID操控器的份额、积分、微分系数。
2 车载天线伺服体系
2.1 车载天线伺服体系的组成
车载天线体系由两部分组成:户外设备和户内设备。户外设备首要是天线伺服盯梢体系(包含渠道、渠道伺服盯梢体系、惯性传感器、GPS、卫星天线等);户内设备首要是操控器(包含各传感器接口、数据收集、操控器、卫星接纳机等)和主控核算机,两者之间选用电缆衔接,具有安稳盯梢和接纳卫星信号的两大功用。
本体系选用德州仪器推出的TMS320LF2407A,与传统的单片机比较有巨大的优势。只需外加较少的硬件即可完成电机操控体系。本体系选用增量式光电码盘反应转子的速度和磁极方位及初始方位。车载天线伺服体系含糊PID操控框图如图1所示。
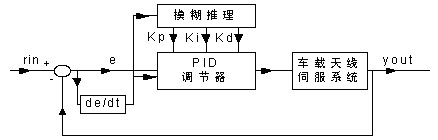
图1 车载天线伺服体系含糊PID操控框图
2.2 车载天线伺服体系数学模型的确认
若电机的负载为常数且只输出电机滚动的角速度,则得到直流伺服电机的传递函数如式(1)。

其间, ωa是转子旋转的角速度,KV和Kt是由永磁体的磁通密度、转子绕组的数目以及铁芯的物理性质决议的速度常数和力矩常数, J是转子和电机负载的滚动惯量。B是整个机械旋转体系的阻尼常数。由电机特性与体系特性,得到电机各参数Ra; La;KV;Kt;J; 的值:把这些参数值代入式(1),得到电机的传递函数如式(2)所示:

转台下部直流伺服电机驱动子体系结构框图如图2所示,其间1/10为蜗轮蜗杆的减速比。

图2 直流伺服电机滚动体系结构框图
3 含糊PID操控器的规划
PID参数的含糊自整定是找出PID三个参数Kp、Ki、Kd与e和ec之间的含糊联系,在运转中经过不断的监测e和ec,依据含糊操控原理对三个参数进行在线的整定。
PID参数的设定是靠经历及工艺的了解,参阅测量值与设定值曲线,然后调整Kp、Ki和Kd的巨细。含糊操控规矩是用于批改PID参数的,含糊操控规矩依据进程的阶跃呼应状况来考虑求取。规矩如下所示:
(1) 预挑选一个满意短的采样周期让体系作业;
(2) 仅参加份额操控环节,直到体系对输入的阶跃呼应呈现临界振动,记下这时的份额放大系数和临界振动周期﹔
(3) 依据下面的详细规矩修正PID操控器参数,直至满意停止。
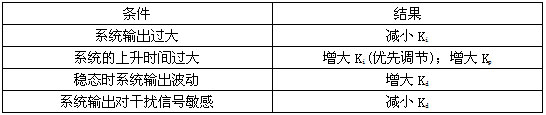
依据上面所述的含糊操控规矩,选用如下的PID参数的调理规矩,如表1、表2、表3所示。
表1 Kp规矩调理表
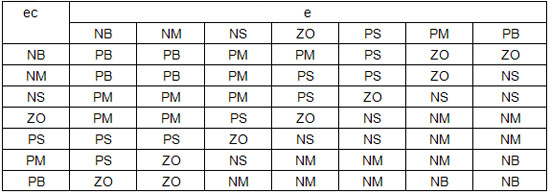
表2 KI规矩调理表
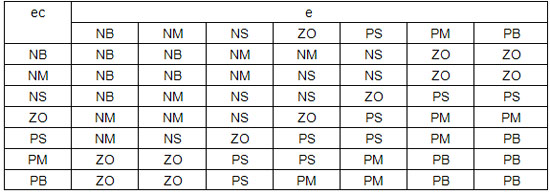
表3 Kd规矩调理表
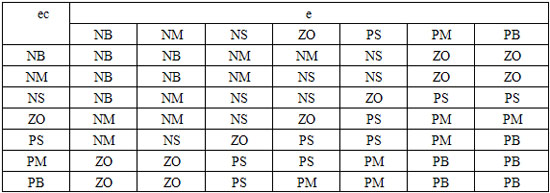
PID三个参数的含糊规矩库建立好今后,就能够依据含糊操控理论进行参数的自调整。将体系差错e和差错改动率ec改动规模界说为含糊上的论域:
e,ec={-3,-2,-1,0,1,2,3}
在含糊操控规则中,e和ec的言语变量值取“负大”(NB),“负中”(NM),“负小”(NS),“零”(ZO),“正小”(PS),“正中”(PM),“正大”(PB)共7个值。它们的从属度函数都是三角形,而且,每个值所取的规模宽度持平。
4 仿真成果
为了验证PID含糊操控器的操控作用,用Matlab/Simulink软件进行仿真,依据体系的数学模型,仿真框图如图3所示。
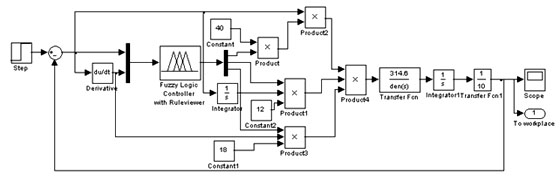
图3 车载天线伺服体系仿真框图
运转仿真程序,得到如图5所示的仿真成果。从图中能够知道,在阶跃呼应下,与传统PID仿真图4比较,该体系的上升时刻和调理时刻大大缩小,超调量显着减小,大大提高了体系的动态功用。
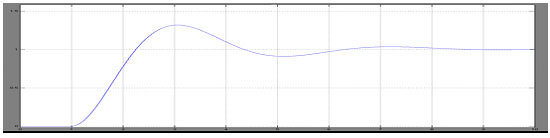
图4传统PID动态呼应曲线
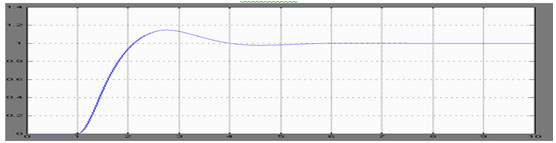
图5含糊PID动态呼应曲线
5 结束语
本论文将含糊操控与SIMULINK相结合,对车载伺服体系规划了一个比较合理的含糊PID操控器而且进行MATLAB仿真。因为车载天线处于一个实时改动的环境,导致体系参数可能会依据环境改动。传统的固定操控参数的操控战略没有办法满意这样的需求,而含糊自习惯操控却刚好补偿这一缺点。一起含糊自习惯操控还很好地处理了伺服体系自身自带的因为惯量引起的差错。软硬件结合真实满意了体系的快,准,稳。为军事上各种雷达天线的规划供给了参阅。





