


跟着永磁磁性材料、半导体功率器材和操控理论的开展,永磁同步电动机(pmsm)在当时的中、小功率运动操控中起着越来越重要的作用。它具有如下的长处:结构紧凑、高功率密度、高气隙磁通和高转矩惯性比等。因而,在伺服体系中越来越被广泛应用。别的,永磁同步电动机是一个非线性体系,它含有角速度ω与电流id或iq的乘积项,因而要得到准确操控功能有必要对角速度和电流进行解耦。关于高精度速度盯梢操控问题,载扰动会对速度动摇发生影响。因而,需要对负载扰动进行估量,来减小它的影响。
因而一般的线性操控办法作用不行抱负。为了处理其操控问题,当时选用的非线性操控办法主要有变结构操控、反应线性化和无源操控等,但这些非线性操控的规划办法比较复杂,不易了解。本文结合矢量操控的坐标改换办法,提出了backstepping操控战略,它不但能够完成永磁同步电动机体系的彻底解耦,规划办法比较简单,而且操控作用比传统的pid操控更具有显着的优越性。别的,经过规划负载转矩扰动观测器[6]来下降负载扰动对速度动摇的影响。
永磁同步电动机的反推操控
数学模型
选用外表式的永磁同步电动机,其依据同步旋转转子坐标的d-q模型[1]如下:
其间:ud, uq是d,q轴定子电压;id,iq是d,q轴定子电流;r是定子电阻;l是定子电感;tl是安稳负载转矩;j是转动惯量;b是粘滞磨擦体系;p是极对数;ω是转子机械角速度;φf是永磁磁通。
backstepping操控完成
backstepping 作为一种有用的非线性操控规划办法,它是依据李亚普诺夫函数规划的操控,因而规划的操控器能够确保体系的大局渐近安稳,而且能够到达电流盯梢的作用,使得体系具有快速的响应速度[2]。
依据backstepping规划过程[3,4],能够规划实践的操控ud,、uq为:
负载扰动观测器规划
在一些高精度伺服体系中,负载扰动会发生改变,使速度发生动摇,然后导致体系伺服功能的下降。因而,在高精度速度盯梢操控中,需要对负载扰动进行估量,实时加以在线补偿。
由式(3),得:


因为负载扰动不易直接丈量,这儿能够经过已取得的iq、ω加以观测。考虑到iq、ω的丈量会发生噪声差错,故在tl观测器的输出端附加一滤波器


令
式(15)可变为:

则所规划的负载扰动观测器如图1所示。
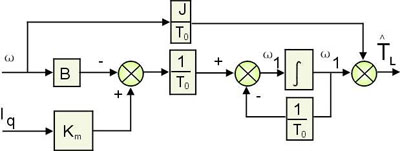
图1 负载扰动观测器






