动翻译,供参阅
小型直流电动机的磁场定向操控放无人驾驶飞机在上升飞翔轨道
无刷直流(BLDC)电动机广泛用于电子设备的规划,如磁盘驱动器,冷却电扇,和DVD播放机,由于它们具有生命周期长,在直流电源上运转,而且相对廉价。一般,BLDCs的速度和扭矩由微操控器运用标量的技能来操控。
一类新的运用正在构成一个由quadrotor无人驾驶飞机,已成为盛行的业余爱好者为代表。无人机也正在考虑相似的监督很多的商业运用。这些运用特别重要的是在操控器的动态呼应和其在低速sensorlessly和安稳地操控BLDCs才能。
标量技能是不行准确的动态改动负载的运用。精度能够经过运用磁场定向操控(FOC)技能,该技能一般用于推进高端工业AC设备能够明显改进。经过施行FOC,BLDCs能够供给准确的操控,无人驾驶飞机和其他高功能运用,如医疗机器人,万向体系,并以合理的本钱自主车。
在曩昔规划这类产品并不简略。它触及的FOC或一些其它高档,杂乱的电机操控技能的了解,如直接转矩操控(DTC),以及专门的软件开发体系的操作常识。当运用程序也是本钱灵敏的 – 例如一个监控摄像头,或许被用于法律无人驾驶飞机 – 那么表征廉价的BLDC电机也提出了应战。
磁场定向操控(FOC)
用于操控BLDC电机的惯例标量技能被称为六步(或梯形)的操控。定子被驱动在六个进程,其发生的转矩发生振动。每对绕组通电,直至转子到达在该点马达被换向到下一个进程的下一个方位。关于传感器运用中,反电动势在定子绕组一般被用来确认转子方位发生的。
标量操控的动态呼应是无法处理的运用与快速改变的动态负载。其成果是,矢量操控现已变得越来越盛行用于各种从沟通电机驱动的白色产品的运用,如洗衣机,以电池供电的产品。
FOC是用于矢量操控的最常用的办法之一。它的作业原理经过办理定子绕组坚持由转子的垂直于定子激磁用永久磁铁发生的磁通。
FOC开始被开发以操控三相沟通电机。鉴于用动力源在小无人驾驶飞机中运用的BLDCs是一个21 V(5-细胞锂聚合物)电池,电子元件有必要包含一个低电压的三相逆变器体系。其它首要部件包含电机驱动器,MCU,或许最重要的是,履行FOC算法的软件。
在直接正交(DQ)域,这是参照一个旋转结构进行FOC处理。的直接和正交重量是交链磁通的状况向量分解成两部分:flux-(d)和转矩(q)的-producing组件。这种联系的图示于图1电机中的电流的定子绕组被操控,以坚持由转子的正交永久磁铁(90°)到定子磁场所发生的磁通。除了出产准确的电机操控,这也供给了十分准确的转矩操控,这是在dq坐标系运营的真实优势。
直接正交的(d-q)的力重量的图画
FOC嗣承继三结构域的改换:(1)在定子实测相电流从三相停止参阅帧被转化为一个停止2相位参阅(α,β); (2)在两相停止参阅帧被改换成在旋转两相参阅体系(DQ)是与转子磁通对齐;和(3)为了实践驱动电机,在dq组件回改换到定子基准帧和用于空间矢量脉宽调制(SVPWM)。此进程示于图2。
需求FOC操控域改换的图画
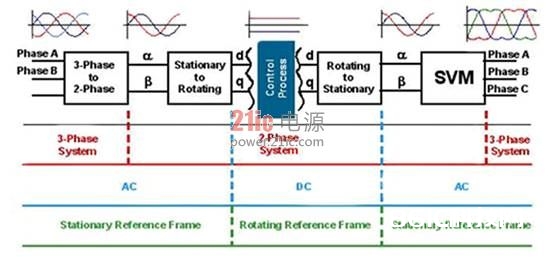
图2:需求FOC操控域的转化。
具体转子方位信息是必需的,以便使与转子在dq坐标系。转子方位估量技能的规模从相对简略,反电动势过零检测到杂乱的滑模观察员和扩展卡尔曼滤波器。
驱动电机
改换从静态三相参阅帧到2相的dq坐标系的成果在先前说到的直接和正交重量。直接(D)成分不供给有用扭矩,事实上,趋向于添加电机轴承的磨损。一个方针是最小化这个组件。正交(Q)重量发生实践电机转矩和由运用程序确认的。
在dq重量加到2的PI(份额 – 积分)操控器参照零,而且运用扭矩设定别离以发生一个矢量输出。两个PI操控器的输出是(新的)直接和正交电压所需的定子电压空间矢量的重量。如前所述,最终一步是将在dq组件回定子参阅帧以实践驱动电机。
所描绘的进程是仅FOC操作的汇总。完成要求适当杂乱,超出了本文的规模很多的中心进程。 FOC的,是专门直接联系到小型无人驾驶飞机的更完好的评论中能够找到“高功能电机操控,”论文由中心昆士兰大学,Australia.1的帕特里克·费希尔
其间包含所需的暂时进程是:
确认所述电机的特性(BLDC电机很少供给比极和电压和电流额定值的数目更多铭牌信息)。
转子方位估量(用于完成FOC操控要害信息)
规划一个适宜的电源操控计划
规划转矩和转速操控器
从地上爬起来规划一个完好的,功用FOC型电机操控体系十分艰巨的半导体公司,包含德州仪器,Atmel公司和恩智浦半导体已创立开发工具,去除大部分的杂乱性从简略的完成FOC的规划。在一般状况下,IC供货商也挑选经过存储在ROM中所运用的开发工具的软件库,使它们只能在特定的MCU来维护自己的常识产权。
德州仪器(TI),例如,已在TI的C2000短笛32位MCU系列三种类型的InstaSPIN-FOC解决计划可供挑选:F2806x,F2805x和推出的F2802x。关于小型无人机的运用,是十分灵敏的本钱,最适宜的MCU是推出的F2802x MCU系列的成员,与最盛行的特定设备作为TMS320F28027FPTT。
如前所述,准确的电机操控依赖于创立电动机的准确模型。 InstaSPIN-FOC包含被称为“观察者”来估量转子磁链,视点,速度专有软件算法和扭矩(FAST)。 InstaSPIN-FOC还供给电机参数辨识的开展进程中脱机提取必要的功能参数和运转进程中的在线盯梢参数。
电动机参数信息用于调谐电流操控带宽。不同于其他技能,TI的FAST观测彻底是自我调整,需求进行正确操作没有任何调整。 TI宣称它是仅有的强健和“瞬间”操作传感器,FOC市场上的解决计划。
因而,规划人员能够有一个彻底调整传感器观测和发动开展分钟内彻底调整好而且安稳的FOC转矩操控体系。在如螺旋桨操控的运用程序,留给规划者的仅有使命是查验和调整的单一的PI速度操控环路所需的功能和操作。
根本驱动体系的简化版别显现在图3中的速度的PI操控器的输出被衔接作为用于PI-电流操控器输入的参阅信号。假如速度过低,则马达的电流添加,以发生更大的扭矩以加速其速度。相反,假如电动机太快,电动机的转矩降低到使电机减速。总归,这两个PI操控构成级联操控环路,这意味着一个操控体系,它包含一个外环与一种或多种内循环。 (变量的Kd,Kd值,嘉,和KB在图中由电机操控软件生成的系数。)
德州仪器速度操控器的图画级联的电流操控器

图3:级联电流操控器速度操控器。 (礼貌德州仪器)
要害部件
除了MCU,其他一些要害部件也值得一提。三相驱动器和逆变器体系是必需的。低电流运用,如小扭矩无人机能够运用部分来自TI DRV83x2系列集成三相电机驱动器(如DRV8332DKDR)。该DRV83x2系列包含因各种毛病状况规划便于体系集成和易用性,以及维护永久性毛病的设备先进的维护电路,如短路,过流,过热,欠压。
或许在商业运用中运用的高电流的体系需求一个独立的预驱动器如DRV8301DCAR并在一个三相逆变器装备单个的FET。一个比如是TI的CSD18533Q5A NexFET功率MOSFET。
开展软件与FOC型电机操控运用成功的要害。 TI开发了一套包含在BoosterPack BOOSTXL-DRV8301电机驱动开发软件。它一般是在6至24个V和多达10个的接连的最佳挑选。这需求一个操控板等C2000短笛TMS320F28027F的LaunchPad与InstaSPIN-FOC – 如LAUNCHXL-F28027F。关于小于3.5的接连电机,DRV8312-69M-KIT一般是更好的挑选。
TI的产品系列显得愈加契合低电压,比其他厂商的低扭矩运用程序,但一些供给电机操控开发套件为好。恩智浦半导体供给电机操控开发套件BLDCs。该OM13068 LPC1549 LPCXpresso电机操控套件用于与该公司的LPC1549JBD48QL MCU。这个渠道能够用来操控BLDC,BLAC,踏步机,及双刷直流电机。
运用这些组件的规划能够在功能方面市售马达操控器,用于小BLDC电机进行比较。定制的FOC操控器和商业操控器之间的最明显差异如毛绒40是其整流在十分低的速度的才能。在FOC操控器能够在约100转的速度操控一切四台电机。此外,使用InstaSPIN的速度环电机开发这些低转速扭矩明显。
自定义FOC板还能够完成最高电机速度比商业操控器更快。均匀来说,自定义的FOC操控器是在转化从零的马达,以全速快35%。此外,依据FOC操控各电动机的空载速度比任何商业操控器tested.1更快
定论
一类新的电机操控运用正在鼓起,需求小的BLDC电机优异的动态呼应。运用领域包含医疗机器人,万向体系,自主车和小型无人驾驶飞机。尽管FOC电机操控技能现已运用了几十年的沟通工业和白色家电马达,他们没有被运用到小型电机搭载的电池组,由于该技能是先进的,并需求高功能的MCU。在曩昔的几年中,但是,新产品现已呈现,使这种或许性成为实际。