步进电机是一种感应电机,它的作业原理是运用电子电路,将直流电变成分时供电的,多相时序操控电流,用这种电流为步进电机供电,步进电机才干正常作业,驱动器便是为步进电机分时供电的,多相时序操控器。

尽管步进电机已被广泛地运用,但步进电机并不能像一般的直流电机,沟通电机在惯例下运用。它有必要由双环形脉冲信号、功率驱动电路等组成操控体系方可运用。因而用好步进电机却非易事,它涉及到机械、电机、电子及核算机等许多专业知识。步进电机作为履行元件,是机电一体化的要害产品之一,广泛运用在各种自动化操控体系中。跟着微电子和核算机技术的开展,步进电机的需求量日积月累,在各个国民经济领域都有运用。
步进电机的单脉冲操控与双脉冲操控
步进电机的操控有单电压和凹凸电压操控之分;
单电压操控用一串脉冲信号操控一个电子开关的通、断来操控电机驱动绕组得电、失电;
凹凸电压操控在单电压操控的根底上,用另一串脉冲操控一个电子开关的 通、半导通 ,两个开关串联,两个操控脉冲同频率但不同相位和宽度。到达给绕组的供电电压全、一半、敏捷关断的意图。
步进电机的开环操控和闭环操控
步进电机的开环操控
1、步进电机开环伺服体系的一般构成
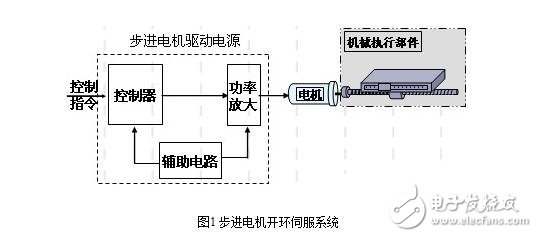
步进电动机的电枢通断电次数和各相通电次序决议了输出角位移和运动方向,操控脉冲分配频率可完成步进电动机的速度操控。因而,步进电机操控体系一般选用开环操控办法。图为开环步进电动机操控体系框图,体系首要由操控器、功率放大器、步进电动机等组成。
2、步进电机的操控器
1、步进电机的硬件操控
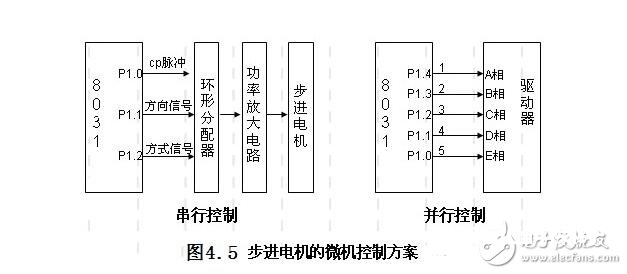
步进电动机在—个脉冲的效果下,转过一个相应的步距角,因而只需操控必定的脉冲数,即可准确操控步进电动机转过的相应的视点。但步进电动机的各绕组有必要按必定的次序通电才干正确作业,这种使电动机绕组的通断电次序按输入脉冲的操控而循环改动的进程称为环形脉冲分配。
完成环形分配的办法有两种。一种是核算机软件分配,选用查表或核算的办法使核算机的三个输出引脚顺次输出满意速度和方向要求的环形分配脉冲信号。这种办法能充分运用核算机软件资源,以削减硬件本钱,尤其是多相电动机的脉冲分配更显示出它的长处。但因为软件运转会占用核算机的运转时刻,因而会使插补运算的总时刻添加,然后影响步进电动机的运转速度。
另一种是硬件环形分配,选用数字电路建立或专用的环形分配器材将接连的脉冲信号经电路处理后输出环形脉冲。选用数字电路建立的环形分配器一般由分立元件(如触发器、逻辑门等)构成,特点是体积大、本钱高、可靠性差。
2、步进电机的微机操控:
现在,伺服体系的数字操控大都是选用硬件与软件相结合的操控办法,其间软件操控办法一般是运用微机完成的。这是因为根据微机完成的数字伺服操控器与模仿伺服操控器比较,具有下列长处:
(1) 能明显地下降操控器硬件本钱。速度更快、功用更新的新一代微处理机不断涌现,硬件费用会变得很廉价。体积小、重量轻、耗能少是它们的一起长处。
(2) 可明显改进操控的可靠性。集成电路和大规模%&&&&&%的均匀无故障时(MTBF)大大善于分立元件电子电路。
(3) 数字电路温度漂移小,也不存在参数的影响,稳定性好。
(4) 硬件电路易标准化。在电路集成进程中选用了一些屏蔽办法,能够防止电力电子电路中过大的瞬态电流、电压引起的电磁搅扰问题,因而可靠性比较高。
(5) 选用微处理机的数字操控,使信息的双向传递才能大大增强,简略和上位体系机联运,可随时改动操控参数。
(6) 能够规划适合于很多电力电子体系的一致硬件电路,其间软件能够模块化规划,组装构成适用于各种运用目标的操控算法;以满意不同的用处。软件模块能够方便地添加、更改、删减,或许当实践体系改动时完全更新。
(7) 进步了信息存贮、监控、确诊以及分级操控的才能,使伺服体系更趋于智能化。
(8) 跟着微机芯片运算速度和存贮器容量的不断进步,功用优异但算法杂乱的操控战略有了完成的根底。
3、步进电机的功率驱动电路
要使步进电动机能输出满足的转矩以驱动负载作业,有必要为步进电机供应满足功率的操控信号,完成这一功用的电路称为步进电动机驱动电路。驱动电路实践上是一个功率开关电路,其功用是将环形分配器的输出信号进行功率放大,得到步进电动机操控绕组所需求的脉冲电流及所需求的脉冲波形。步进电动机的作业特性在很大程度上取决于功率驱动器的功用,对每一相绕组来说,抱负的功率驱动器应使通过绕组的电流脉冲尽量挨近矩形波。但因为步进电动机绕组有很大的电感,要做到这一点是有困难的。
常见的步进电动机驱动电路有二种:
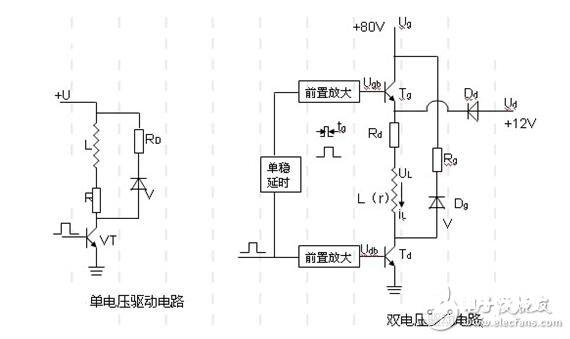
图4.6 步进电机驱动电路
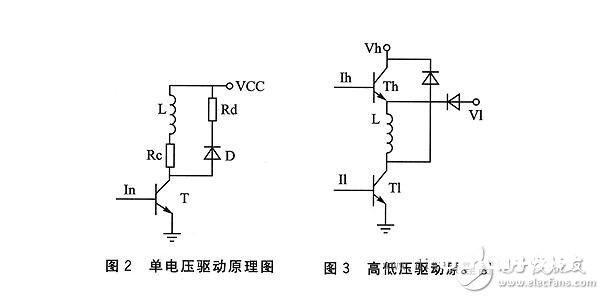
(1)单电压驱动电路
这种电路选用单一电源供电,结构简略,本钱低,但电流波形差,功率低,输出力矩小,首要用于对速度要求不高的小型步进电动机的驱动,图6-19所示步进电动机的一相绕组驱动电路(每相绕组的电路相同)。
当环形分配器的脉冲输入信号  为低电平(逻辑0,约1V)时,尽管VT1
为低电平(逻辑0,约1V)时,尽管VT1 、
、 管都导通,但只需恰当挑选
管都导通,但只需恰当挑选 的阻值,使
的阻值,使 《0(约为-1V),那么
《0(约为-1V),那么 管就处于截止状况,该相绕组断电。当输入信号
管就处于截止状况,该相绕组断电。当输入信号  为高电平3.6V(逻辑1)时。》0(约为0.7V),
为高电平3.6V(逻辑1)时。》0(约为0.7V), 管饱满导通,该相绕组通电。
管饱满导通,该相绕组通电。
(2)双电压驱动电路 又称凹凸压驱动电路,选用高压和低压两个电源供电。在步进电动机绕组刚接通时,通过高压电源供电,以加速电流上升速度,推迟一段时刻后,切换到低压电源供电。这种电路使电流波形、输出转矩及运转频率等都有较大改进。
当环形分配器的脉冲输入信号为高电平时(要求该相绕组通电),二极管 的基极都有信号电压输入,使均导通。所以在高压电源效果下(这时二极管
的基极都有信号电压输入,使均导通。所以在高压电源效果下(这时二极管 两头接受的是反向电压,处于截止状况,可使低压电源不对绕组效果)绕组电流敏捷上升,电流前沿很陡。当电流到达或略微超越额外稳态电流时,运用守时电路或电流检测器等办法堵截
两头接受的是反向电压,处于截止状况,可使低压电源不对绕组效果)绕组电流敏捷上升,电流前沿很陡。当电流到达或略微超越额外稳态电流时,运用守时电路或电流检测器等办法堵截 基极上的信号电压,所以截止,但此刻仍然是导通的,因而绕组电流即转而由低压电源通过二极管供应。当环形分配器输出端的电压为低电平时(要求绕组断电),基极上的信号电压消失,所以截止,绕组中的电流经二极管
基极上的信号电压,所以截止,但此刻仍然是导通的,因而绕组电流即转而由低压电源通过二极管供应。当环形分配器输出端的电压为低电平时(要求绕组断电),基极上的信号电压消失,所以截止,绕组中的电流经二极管 及电阻
及电阻 向高压电源放电,电流便敏捷下降。选用这种凹凸压切换型电源,电动机绕组上不需求串联电阻或许只需求串联一个很小的电阻
向高压电源放电,电流便敏捷下降。选用这种凹凸压切换型电源,电动机绕组上不需求串联电阻或许只需求串联一个很小的电阻 (为平衡各相的电流),所以电源的功耗比较小。因为这种供压办法使电流波形得到很大改进,所以步进电动机的转矩一频率特性好,发动和运转频率得到很大的进步。
(为平衡各相的电流),所以电源的功耗比较小。因为这种供压办法使电流波形得到很大改进,所以步进电动机的转矩一频率特性好,发动和运转频率得到很大的进步。
步进电机的闭环操控
同开环操控体系比较,闭环操控具有一系列长处。在反应操控体系中,不论出于什么原因(外部扰动或体系内部改动),只需被操控量违背规定值,就会发生相应的操控效果去消除误差。因而,它具有按捺搅扰的才能,对元件特性改动不灵敏,并能改进体系的呼应特性。但反应回路的引进添加了体系的杂乱性,并且增益挑选不妥时会引起体系的不稳定。为进步操控精度,在扰动变量能够丈量时,也常一起选用按扰动的操控(即前馈操控)作为反应操控的弥补而构成复合操控体系。