


摘要:介绍了由TMS320F28027和L298N模块以及编码器组成的悬挂运动操控体系。该体系经过操控2个步进电机,操控轴上线的收放来到达使悬挂物在平面内恣意运动的作用,以完成画圆或指定图画和显现当时坐标等功能。首要介绍了步进电机的操控算法和使用TMS320F28027芯片完成方位闭环操控的办法。该体系具有高效、安稳、精确等长处。
导言
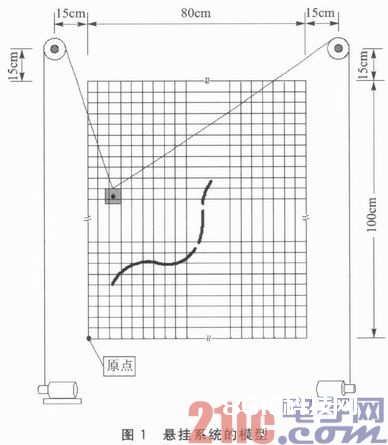
跟着TI公司32位DSP的遍及,32位处理器已经成为操控范畴的主流产品,与传统的微处理器比较速度更快、功能更强、资源丰富,更契合开展的脚步。TMS320F28027是一款32位的DSP,具有运算速度快、安稳性高的长处。本文使用TMS320F28027操控两个步进电机,从而使物体在平面内运动,完成物体在平面内能够恣意地画指定的曲线和圆等。图1为悬挂体系的模型。
1 体系总体方案的规划
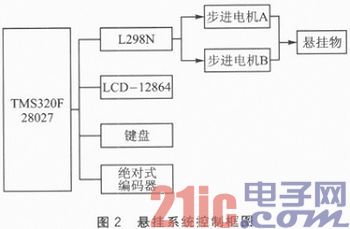
图2为悬挂体系操控框图,以TMS320F28027为操控芯片,使用L298N驱动两个步进电机。步进电机选用42HS4813A4,其额定电流为1.3 A,步距角为1.8°,使用LCD-12864液晶显现被操控物的实时坐标。操控2个步进电机正向、反向滚动来到达物体在平面内恣意运动的作用。
2 硬件电路规划
2.1 L298N
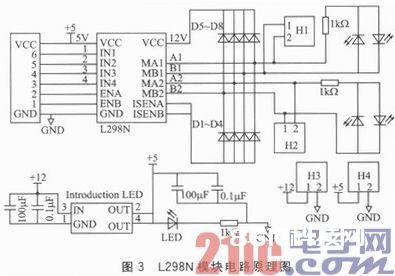
L298N是ST公司出产的一种高电压、大电流电机驱动芯片。图3为L298N模块的电路原理图。该芯片的首要特点是:作业电压高,其最高作业电压可达46 V;输出电流大,瞬间峰值电流可达3 A,继续作业电流为2 A;内含两个H桥的高电压大电流全桥式驱动器。使用2个L298N来别离操控2个步进电机,步进电机的额定电流为1.3 A,一起通2相时,电流为2.6 A,L298N能够到达42HS4813A4步进电机的电流要求。
2.2 肯定式编码器
肯定式编码器的精度有必要要高于步进电机的精度,所以这儿选用的是10位肯定式编码器。选用的类型是Minil024J,精度为10位,长处在于选用无触摸霍尔检测技能,传感器运转不受尘埃或其他杂物影响,很好克服了根据光学检测原理的缺陷。
3 体系软件规划
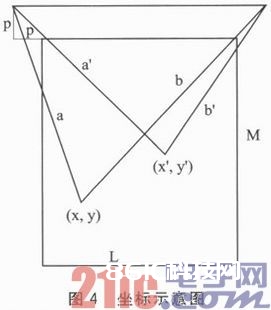
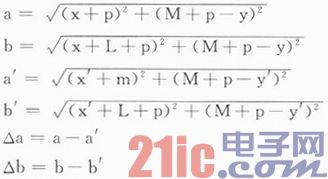
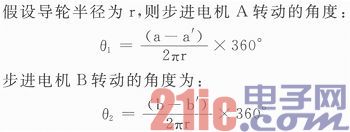
3.1 几许联系1:从恣意点移动到恣意点算法
坐标示意图如图4所示,有如下的边长和视点联系:
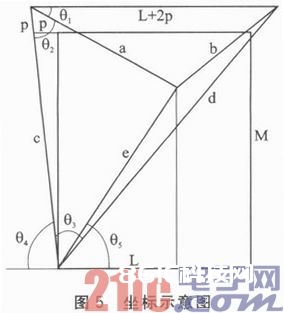
3.2 几许联系2:当时方位坐标显现算法
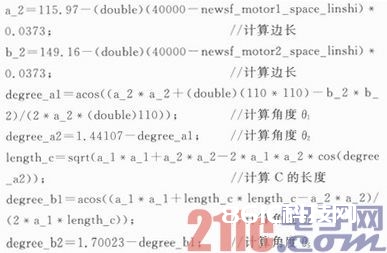
如图5所示,存在以下的视点和边长联系:

操控代码如下:
3.3 电机方位闭环操控办法
步进电机闭环操控框图如图6所示,TMS320F28027别离用2个定时器来操控两个电机,用肯定式编码器对方位进行监控,进行失步补偿,确保方位正确,而且能够使曲线油滑。

步进电机的类型为42HS4813A4,为了避免失步,步进电机每步的最小间隔为4 ms,而且用软件对步进电机进行了十六细分,即每步的间隔为0.45°。操控电机部分的程序流程图如图7所示。

操控代码如下:
newsf_motorl_SpeedAndSpace_access((int)flag_motorl_paces,flag_cputimer_1,2); //定时器1操控步进电机1
newsf_motor2_SpeedAndSpace_acccss((int)flag_motor2 paces,flag_cputimer_2,2); //定时器2操控步进电机2
3.4 画图算法
使用几许联系恣意点到恣意点的算法,别离给处理器一连串的方位坐标,操控物体的运动轨道,如图8所示。
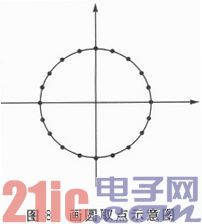
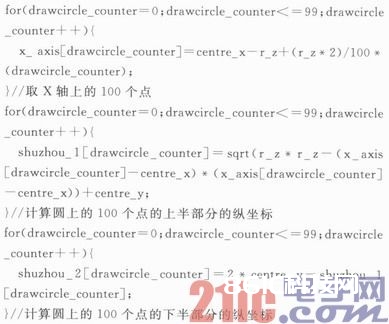
相同间隔取N个点,别离输入处理器,来操控物体的坐标。将取的点传递给TMS320F28027时,为了让圆满足的滑润,消去锯齿状,所以在圆上取了200个点。操控代码如下所示:
4 体系测验
体系完成后,进行了两项测验,别离是画圆运动和运动到指定点。
其间画圆运动测验是在输入圆心坐标以及半径后,对实践画出圆的直径与理论直径作了比照,而且记录了画圆的耗时。此测验中,圆心坐标为(40.0cm,40.0cm),输入的半径值为30.0cm,测验成果如表1所列。

其间,运动到指定点测验是以坐标原点为起始点,在输入指定坐标之后,对原点到指定点间隔的理论值和实践值作了比照,而且记录了运动完后回到原点的差错间隔,即是否能精确回到原点。在此测验中,运动的原点坐标为(0cm,0cm),方针坐标为(49.0 cm,50.0 cm),即间隔原点为70.0cm,实践测验时,运动到(49.1 cm,49.2 cm),即间隔原点69.5 cm,测验成果如表2所列。
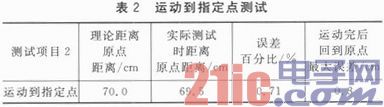
由测验成果可看出,该体系具有高效、安稳、精确的长处,契合试验预期。






