一、引 言
光学陀螺是依据光学萨格奈克效应的一种惯性导航丈量设备,该项技能归纳惯性外表理论、现代操控理论、核算机处理技能、微纳加工技能等现代工程技能于一体,广泛运用于陆海空天等许多惯导运用范畴,比方导弹、火箭、卫星、太空勘探器、飞机、水面舰船、潜艇、车辆、机器人、钻井测斜及天线安稳设备等。
现有的陀螺仪首要分为机电式陀螺和光学陀螺,其间机电式陀螺因为可靠性,抗冲击性等约束逐步被光学陀螺所替代,其间光学陀螺又分为激光陀螺和光纤陀螺,当时国内外首要多光纤陀螺进行研讨运用,其间包含谐振式和干与式两种,其间干与型陀螺已经在多种惯性体系中得到运用,而谐振式陀螺现在还处于实验室研讨阶段,它具有短光纤、小型化、无Shupe差错等长处,其作为下一代光学陀螺的干流技能代表具有十分重要的研讨含义【1】。
二、陀螺检测基本原理
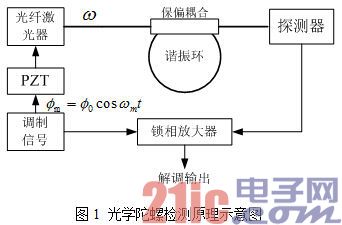
图1为光学陀螺检测原理示意图,图1中光纤激光器输出中心频率为的高相干激光
,该相干光经PZT进行频率为
的调制后经过保偏耦合器将激光耦合进入光学谐振环,谐振腔输出信号由InGaAs-PIN光电勘探器转化为微电信号,该微电信号进入锁相扩大器进行小信号解调,解调出的信号随即进行数字收集送入核算机进行软件处理【2】。其间调制信号发生器发生
进行正弦波调制,一路进行PZT光频调制,一路送入锁相扩大器作为输出信号的解调参阅输入。
设激光器输出光场表明为:
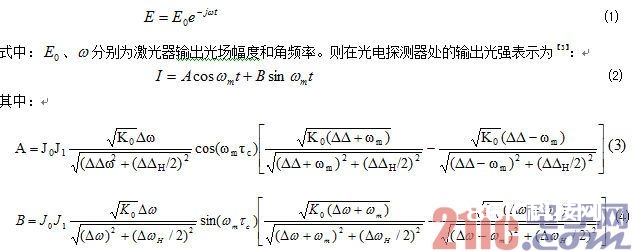
式中:J表明榜首类贝塞尔函数,
为耦合器的抱负耦合比,
为谐振腔输出谱线宽度,
为PZT 调制频率,
为激光器输出角频率与环形腔谐振频率
的差值,
为谐振环中光子半衰期。 由式(4)得知,B项相位与调制信号的相位相差 ,运用锁相扩大器解调出包含有旋转角速度信息的B,图2为锁相扩大器解调输出曲线仿真示意图,在解调曲线的线性作业区间,解调输出信号的幅值 和陀螺的旋转角速度
成简略的线性联系,经过解调输出的信号崎岖值即可得到相应的旋转角速度数值。其间
为谐振环的谐振频率。本项目即经过优化体系规划到达谐振点的主动确定和动态盯梢的研讨意图。
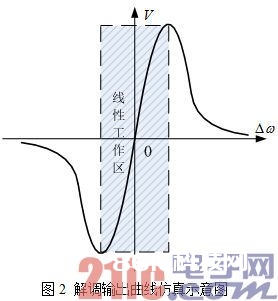
图3为陀螺检测体系原理图, FL(光纤激光器)输出经频率调制后的激光,由C1(3dB耦合器)分红两束分束比为1:1的子光路,一路经过AOFS1(声光移频器1)后由C2耦合器进入谐振腔沿逆时针光路进行传输经过C4耦合到C3经过PD1(光电勘探器1)进行光电勘探输出,PD1经过LIA1(锁相扩大器1)进行相关检测解调输出小信号,把该路信号界说为逆时针解调分路信号,逆时针分路输出信号用于体系谐振点确定。信号送入凌华PCI-9846高速多通道同步收集板卡通道1进行同步数字采样,数字信号经过PCI总线与陀螺测验软件进行数据链接,经过陀螺谐振点自确定算法运算后将待确定差错反应给DA运算单元,软件将当时反应操控数字信号经过PCI总线送入凌华PCI-6208 16-bits数字模仿输出板卡,PCI-6208输出3路模仿反应输出信号,别离操控PZT(压电陶瓷晶体)的基准偏置电压和AOFS1,AOFS2的光频移频操控电压。 体系自控算法依据操控因子参数进行自确定,当待确定规模比较大时进行PZT光源调整,当待锁规模处于声光移频器的确定差错规模时,体系进行声光细锁操作。当体系确定到谐振点静态差错答应规模内时,体系逆时针分路确定完结,检测软件主动核算出谐振频率值。其间
并暂存记为
。
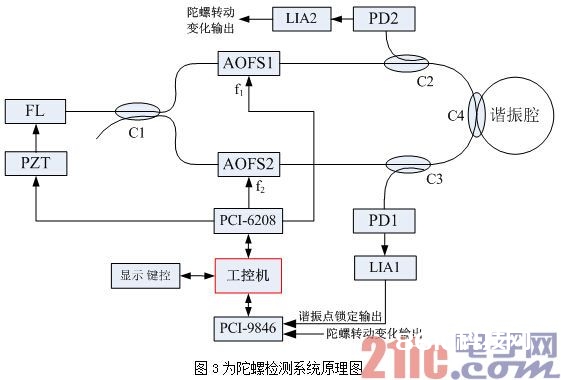
逆时针分路进行谐振点自锁的一起,另一路光路经过AOFS2(声光移频器2)由C3耦合器进入谐振腔沿顺时针光路进行传输经过C4耦合到C2经过PD2进行光电勘探输出,PD2(光电勘探器2)经过LIA2(锁相扩大器2)进行相关检测输出,此路输出信号用于陀螺开环模仿输出,与此一起,该模仿信号经过凌华PCI-9846高速多通道同步收集板卡通道2进行同步数字采样,软件反应核算与逆时针分路操作相似。
当顺时针子体系确定到谐振点静态差错答应规模内时,体系顺时针分路确定完结,检测软件主动核算出谐振频率
并暂存记为
。
在上述情况下,经过谐振点确定算法得到逆时针和顺时针光波的谐振频率
和
,当陀螺中止时,
=
,当陀螺旋转运动时,顺逆时针光路会发生一个谐振频差,有:
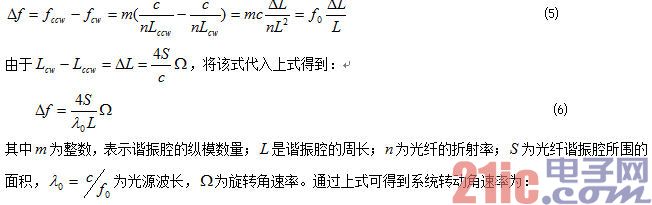
其间m为整数,表明谐振腔的纵模数量;L是谐振腔的周长;n为光纤的折射率;S为光纤谐振腔所围的面积,
为光源波长,
为旋转角速率。经过上式可得到体系滚动角速率为:
别的阐明:当关于N匝的光纤谐振腔,周长L变为NL,面积S变为NS,
变为:
,可是
=
。从上式能够看出,关于多圈谐振腔与仅有一匝光纤的谐振腔公式相同,关于谐振式光纤陀螺,添加匝数即添加光纤长度,其自在谱规模 减小,相应地下降了精密度,因而不能增大萨格奈克效应。只要精密度必定,才干经过添加光纤匝数进步谐振式光纤陀螺的检测灵敏度。
三、电控检测体系规划
电控检测体系分为前级信号调度(光电转化电路规划、相关检测部分)、多通道同步AD转化部分、多通道DA转化部分、声光驱动部分、PZT驱动部分。体系原理图如图4所示

3.1 前级信号调度部分
光纤陀螺850nm波长一般选用Si-PIN光电勘探器,1310nm和1550nm波长选用InGaAs-PIN光电勘探器,与一般勘探器比较具有:1、暗电流较小;2、灵敏度高;3、复合噪声较小;4、结电容较小,改进频率呼应;5、呼应波长规模较宽。为了使PIN光电勘探器到达最佳特色,选用PIN-FET组和电路规划,PIN管反偏高输出阻抗,与FET的高输入阻抗相匹配,一起减小了外部搅扰和杂散%&&&&&%,大大下降了热噪声,这对低噪声器材运用规划大有益处。
关于勘探器组件,首要技能目标是其增益、带宽以及噪声水平。勘探器组件的增益上限为最大光功率入射情况下使其输出不饱和的最大值。一般,勘探器组件的带宽是光纤陀螺本征频率的10倍以上,在本规划运用中,勘探器的带宽选在4MHz以上,然后防止调制失真现象发生。前置扩大器之后联接隔直电路,滤掉勘探器输出信号的直流重量,为后续AD转化器的采样电压供给杰出的作业规模。
关于勘探器组件,首要技能目标是其增益、带宽以及噪声水平。勘探器组件的增益上限为最大光功率入射情况下使其输出不饱和的最大值。一般,勘探器组件的带宽是光纤陀螺本征频率的10倍以上,在本规划运用中,勘探器的带宽选在4MHz以上,然后防止调制失真现象发生。前置扩大器之后联接隔直电路,滤掉勘探器输出信号的直流重量,为后续AD转化器的采样电压供给杰出的作业规模。
光电勘探器前置扩大器的联接方法首要有3种:低阻抗、高阻抗和跨阻抗电路。低阻抗电路具有带宽宽、噪声低的特色,但整个电路的信噪比受扩大器低输入阻抗的影响;高输入阻抗电路信噪比灵敏度高,动态规模及带宽较低。跨阻抗联接具有灵敏度高、信噪比高、带宽宽、动态规模适中等特色,本规划选用跨阻抗电路规划[4]。
前放的功能首要表现勘探器组件的频率、阻容、噪声以及扩大倍数等功能。图5为勘探电路的电路原理图。

榜首级为场效应管(FET)共源极扩大器,FET具有输入阻抗高,热噪声低的特色,共源极接法有较高增益,输入为电压变量,输出为电流变量,在扩大区小信号作业时,可看作系数为G的线性跨导扩大器。 第二级为PNP晶体管共基极扩大器,R3,R4构成直流偏置,C2为沟通旁路,使基极与地沟通短路,成为公共参阅点,发射极输入,集电极输出。扩大器的特色是频率特性好、电压增益高、无电流增益、输入阻抗低、输出阻抗高,正好与前后级匹配。 第三级为NPN晶体管共集电极扩大器,此电路以集电极经过电源回路成为公共参阅点,基极输入,发射极输出,又称射极跟从器。其特色是频率特性好、电压无增益、输出跟从基极电压、输入阻抗高、输出阻抗低、驱动能力强。 三级扩大器材匹配杰出,组成了一个频率特性好、噪声低、电压电流增益都比较高、输入对前级加载轻,输出对后级驱动能力强的扩大通路。
3.2 AD/DA规划
AD/DA规划选用凌华公司的PCI9846H板卡和PCI6208组合运用,合作上位机进行数字处理操控,项现在期规划选用DAQ2501多功能数采板卡,也到达了不错的运用效果,可是因为项意图参数深化规划需求到达同步高精度高采样速率的需求,DAQ2501板卡的总AD采样数率为400KHz/s,而且不能同步收集,在软件规划上只要选用单通道分时采样规划,这样使程序规划不能进行高速收集,而且受DA数率1MHz/s的约束,对外部3通道操控时效果不行抱负,使得在该规划中操控数率达不到规划目标[5]。
对此,咱们挑选PCI9846H板卡进行后续晋级规划,因为PCI9846具有单通道40MS/s的收集速率,而且能进行多通道同步收集,使软件运转速率大大进步,数字处理时刻大大下降,比较DAQ2501其收集速率进步了100倍。而且收集精度为16bits,而DAQ2501仅为12bits,在收集精度上有以下运算,当收集规模在±5V时:
从上述数值比较能够看出,收集精度进步了一个数量级。图6所示为PCI9846数据收集通道原理框图【5】。

四、软件体系规划
软件规划分为主程序规划和子程序规划,其间子程序要点介绍谐振点主动搜索子程序和谐振点稳定子程序,其间这里边牵涉的锯齿波扫频、直流反应操控(PZT)、PZT移频值在线核算;声光移频器手动/主动操控,AOFS移频在线反应核算;顺时/逆时针两路同步收集反应运算;还有显现输出、转台校准操控、人机交互、检测报表输出等部分省掉介绍。
4.1 主程序规划

图7为陀螺检测主程序规划,程序上电运转后进入初始化参数设置子程序,对陀螺检测面板上的设定参数进行程序初始化;然后程序进入锯齿波扫频子程序,该过程首要便于谐振点主动检测子程序对谐振点的大致规模进行开始估量,因为自控算法关于越挨近操控值邻近操控时刻越短,越有利于快速检测需求,所以在该步参加锯齿扫频。当锯齿扫频得到谐振点值的大致操控区间后,程序主动进行软件操控参数修正改写。然后程序中止锯齿扫频,进入PZT直流反应,PZT直流反应经过反应算法核算反应值巨细,PZT仅对反应进行初调整,当调整到希望值小差错规模时,程序进行声光细调整,其间PZT和声光调整逻辑如下所示:

由表1所示能够得出结论:关于PZT而言当顺时针输出和逆时针输出均大(小)于0时,反应操作应进行反应数值加(减)操控,当输出波形发生180度相移时,反之操作。关于AOFS而言,当操控相应分路路时,当差错信号大(小)于0时,应在采纳反应操作信号小规模内减小(添加)调理电压,减小(添加)光频。
经过上述PZT和声光移频器联合反应调整,将体系CCW路调整到谐振点,并经过PZT移频值在线核算和AO移频在线反应核算得到当时谐振点所在的频率值,并将该值进行数据存储,该存储区间值可进行实时改写操作。为便于体系参数剖析,固定巨细区间的存储值可经过软件调出,进行报表输出剖析。
当CCW路谐振点得到操控后,体系对CW也进行上述运算操控,因为体系的PZT初调整已得到操控,此刻仅对CW的操控声光移频器进行细操作找到CW路的谐振点。当陀螺中止不动时,CCW和CW路勘探得到的谐振频率应该持平,此刻得到的旋转频率差值为零,当陀螺以某角速率旋转时,得到的CCW与CW路的谐振频差经过核算子程序(前面介绍的萨格奈克效应计算公式)在线核算出当时的旋转角速率,并显现存储输出。
4.2 谐振点主动搜索子程序
谐振点主动搜索子程序经过程序操控参数和反应算法将收集得到的谐振点差值转化为反应的各项参数进行反应操控。数值传输函数流程图如图8所示。

从图8能够看出,设当时通路解调输出信号函数为r(s)(经过对时域信号拉氏转化的来)输入,操控希望信号输出为y(s),其间极点添加函数再次起到减小操控动摇搅扰的意图,是操控逻辑防止发生震动搅扰操控的影响,体系经过和谐操控反应参数中P,a,b的数值以及极点级数即极点值,到达快速反应操控的意图,然后进一步完成谐振点主动搜索确定的意图。图9为谐振点主动确定子程序流程示意图。该操控逻辑请参阅与表1中反应逻辑联系。

五、体系测验
体系测验分为光电转化信号检测、激光器扫频解调信号检测、谐振点自锁信号检测、体系反应信号检测、声光模仿滚动信号测验、转台操控测验、动态滚动测验等。本文仅部分测验进行测验阐明。
5.1 调制解调信号测验
光电转化信号检测部分首要为了检测谐振腔的光学特性,经过选用PCI6208生成三角波扫频信号对激光器进行频率扫频,得到图10体系调制解调光电勘探器输出信号测验图。
激光器扫频解调信号检测曲线测验即陀螺测验体系中两路锁相扩大器的模仿输出解调曲线,图11为测验选用四通道示波器进行显现输出。图11中红线为示波器通道1信号,该信号为CW路即谐振点实时确定路显现输出,蓝线为示波器通道2信号,该信号为CCW路即开环输出陀螺信号显现输出,其间绿线为示波器通道3信号,该信号为扫频(反应)信号的显现输出。(注:以下输出测验显现均以该规矩进行演示输出。)


从图11看出,虽然勘探器输出信号有少量不一致,可是经过对外光路的细小调理和锁相扩大器的调理相同能到达解调曲线输出重合性比较好的状况,这对后续陀螺信号的检测供给了很好的前提条件。从图11所实测的解调输出图形与图2所示仿真图形形状相似,阐明体系当时所在的测验状况与理论是相符合的。
5.2 谐振点确定信号测验
谐振点自锁信号检测测验图形如图12所示,谐振点确定测验是为了查验谐振点确定体系的确定效果,包含谐振点由失锁状况到确定状况的确守时刻,确守时过冲幅值参数的测验。

图12(a)所做的测验实验是在调整幅值为0.05,积分时刻参数为60的前提下实验图形,能够精确读出谐振点由1伏锁到0伏时所花费的确守时刻为600ms,确定的过冲幅值为140mV。
图12(b)所做的测验实验是在调整幅值为0.05,积分时刻参数为75的前提下实验图形,能够精确读出谐振点由1伏锁到0伏时所花费的确守时刻为960ms,确定的过冲幅值为24mV。
比较图12(a)和图12(b)两幅图能够得出结论,当添加时刻时能够得到很好的确定现象,即确定过冲能操控到很小,可是确守时刻添加了,这充沛证明了操控理论的操控时刻和过冲幅值的相对立的特色。在实际运用中应依据当时的体系状况,找到比较适宜的时刻-幅值配比,得到适宜的实验条件。
5.3 模仿滚动信号测验
图13为声光模仿滚动信号测验,声光模仿滚动信号测验是对实测体系的验证性实验,在CW路谐振点确定的前提下,经过改动CCW路声光驱动1的移频频率,在四通道示波器上读出当时的开环输出模仿信号幅值,来等效当时陀螺滚动时的等效速率。在此实验中结合软件的等效扫频丈量形式进行实验,实验成果如图13所示:


图13中不同移频值的对应曲线正方向(中频与移频值之和)移频往下,反方向(中频与移频值之差)移频往上,从图13中六幅测验波形图能够看出,移频值的巨细决议当时输出信号幅值的巨细。
5.4 体系零漂测验
零漂测验是体系处于确定状况时,转台中止不动,在四通道示波器上调查陀螺两路输出解调信号幅值随时刻的改变联系,在此测验了6秒、12秒、30秒、60秒的零漂,测验波形图如图14所示。


从图14能够看出,陀螺的零漂幅值随时刻的添加有所崎岖动摇,可是其动摇值小于40mV,在12秒测验时的零漂值小于25mV。到达了比较好的静态零漂效果。
六、总结
在本项目实验中,选用凌华科技PCI-9846和PCI-6208板卡结合凌华工控机等首要硬件渠道进行规划,合作上位机体系软件及外光路等许多光、机、电、算设备器材和谐规划及运用。对光学陀螺体系进行了规划实验,得到了很好的测验成果。其间凌华科技的模组器材在其间起到了很大的效果,表现了很高的技能水平,在软件的结合上面能很好的与咱们的测验实验软件进行无缝联接,大大缩短了项意图研发周期,为项意图终究顺利完结检验起到了相当大的效果。