操控器局域网CAN(Controller Area Network)是国际上运用最广泛的现场总线之一。CAN开始被规划作为轿车环境中的操控总线,在车载各电子操控设备(ECU)之间交流信息,构成轿车电子操控网络。如在发动机办理体系、变速箱操控器、外表配备、电子骨干体系中,均嵌入CAN操控设备[1]。CAN 总线具有实时性强、传输间隔远、抗电磁搅扰才能强、本钱低一级长处,以其高功用、高可靠性和独立的规划而被广泛运用于轿车工业、航空工业、工业操控、安全防护等范畴。
本文提出了一种以Philips LPC2119为操控器的轿车驾驭状况丈量节点的规划, iCAN-bus协议的运用使轿车驾驭状况(方向盘、油门、刹车和ECU操控等信息)的收集、处理和信息办理更具实时性和高效性。经试验测验,该操控体系数据传输快速、精确。
1 CAN总线体系组成形式
1.1 根据iCAN协议的CAN网络
在本文的体系中,选用自主研制的iCAN协议作为本体系的运用协议[2]。iCAN协议是根据CAN的内部通讯协议,该协议细巧、通讯效率高,对硬件资源要求低,十分适合于小型体系的运用。体系中的设备统称为iCAN节点。iCAN协议界说的通讯方法是“面向节点,根据衔接”的通讯方法。“面向节点”是指源节点地址及意图节点地址均已给定,即关于任何一个报文参加通讯的两边是确认的。如图1所示。
“根据衔接”是指在网络中任何一个参加通讯的从站设备都有必要和主站设备之间树立一个独立的通讯衔接。这样也为对任何一个设备的通讯进行监控供给了或许。如图2所示。
1.2 设备的通讯形式
iCAN协议界说了两种通讯方法:主从轮询方法和事情触发方法。主从轮询方法又可分红点对点方法和播送方法;事情触发方法又可分红守时循环方法和状况触发方法。如表1所示。
1.3 实践的iCAN体系规划
在本文规划中,选用分布式处理的思维,每个从节点都能完结一些数据处理作业。例如,在加速度的数据收会集,相应从站完结数据的收集、调度、有用数据的判别等。这样,减轻了主节点的作业量,减少了通讯次数然后能进一步进步通讯质量。
在通讯形式上,选用主从轮询和事情触发相结合的方法。在有从节点收集到有用数据的时分才主意向主节点陈述,在一般情况下是没有任何动作的。之所以还需求主从轮询形式是根据以下原因。从节点假如长期没有向主节点发送数据,有两种或许:榜首,确实没有数据;第二,该节点现已损坏。在节点损坏的情况下,不会有任何数据宣布,所以主节点有必要守时查询从节点的状况,这个查询周期能够设置得比较长,视详细要求而定(典型值在几百毫秒到几秒)。关于损坏的从节点,主站会及时向用户报警。
体系由上位计算机节点(包含嵌入式PC机和CAN接口卡)作为体系的主节点,轿车驾驭状况智能测控节点等作为从节点组成。网络拓扑结构为总线型,通讯介质为屏蔽双绞线。主节点除了担任与从节点的根本通讯外,还担任运转轿车驾驭状况(疲惫驾驭)智能操控程序,动态显示各节点的作业状况和重要的现场参数以及报警信息等,并对各节点的操控参数、运转参数进行整定和修正。体系结构如图3所示。从节点对方向盘、油门、刹车和ECU操控等信息进行收集并传至主节点。关于不同的设备,其总线转化接口原理相同,仅仅详细的转化模块不同。
油门操控加速度传感器丈量节点担任iCAN 总线的物理接口和底层协议的完结。丈量节点如图4所示。
1.4 CAN操控器
该丈量节点的硬件电路以Philips的单片机LPC2119为中心,由高速CAN收发器TJA1050 和抗搅扰电路等组成[3]。LPC2119内带有ARM7内核,具有封装小、功耗低、多个32位守时器、4路10位ADC、2路CAN以及多达9个外部中止等长处,使得节点具有强壮的数据处理才能,可运转高档的算法,如快速傅立叶改换等。TJA1050供给了CAN操控器与物理总线之间的接口,以及对CAN总线的差动发送和接纳功用。TJA1050是轿车专用高速CAN收发器,具有优异的EMC和EMI功用。实践证明,选用LPC2119和TJA1050结构的CAN通讯模块,外围扩展才能强、空间小、一起可改进电磁辐射功用和抗电磁搅扰功用。该智能节点对加速度传感器信号进行模数转化,并对所取得的数据进行处理;CAN操控器用于同上位机进行数据通讯,完结CAN总线数据的接纳与发送作业;各智能测控节点能够对各自的参数进行初始化、主动调整和装备等作业。
1.5 Low-G系列加速度传感器
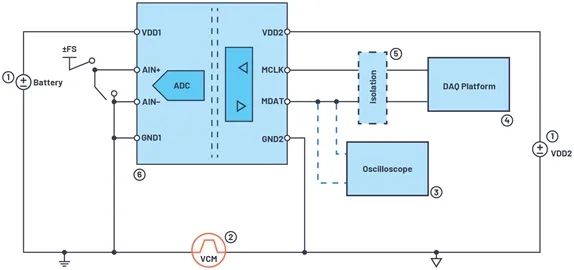
Freescale双轴加速度传感器MMA6260Q由两部分组成:G-单元和信号调度ASIC电路。G-单元是机械结构,它是用半导体制造技能、由多晶硅半导体资料制成;信号调度AS%&&&&&%电路由积分、扩大、滤波和操控逻辑等组成,完结G-单元丈量的信号到电压输出的转化。加速度传感器的输出电压与加速度成正比,为了丈量加速度传感器芯片的输出电压,一般运用带有A/D的微操控器。传感器输出与A/D之间的RC滤波电路用于减小时钟噪声,电源与地之间的0.1μF电容是去耦%&&&&&%,芯片装置时要尽量减小加速度传感器与微操控器之间的间隔。测验电路如图5所示。
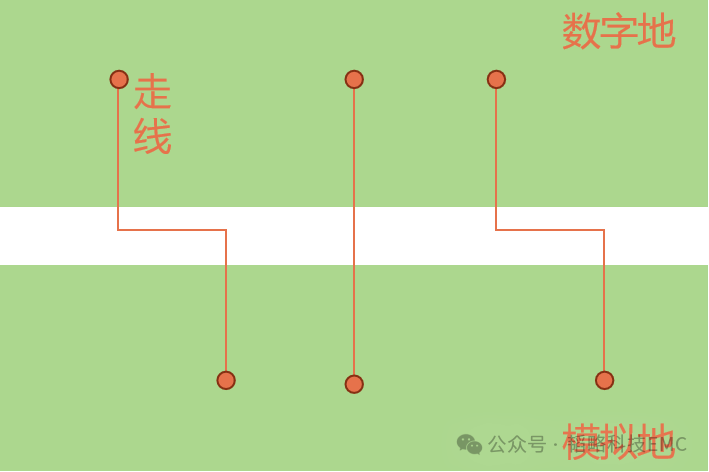
ARM7 LPC2119 的A/D转化器根本时钟由VPB时钟供给。每个转化器包含一个可编程分频器,可将时钟调整至逐渐迫临转化所需的4.5MHz(最大);彻底满意精度要求的转化需求11个转化时钟,10位转化时刻小于2.44μs。为了下降噪声和犯错几率,模仿地和数字地之间、模仿电源和数字电源之间均用10μH的电感进行阻隔。
2 体系软件规划
体系软件规划包含两方面:(1)智能测控节点软件规划。首要是对加速度传感器的采样数据处理和完结与上位机之间的数据通讯功用。(2)上位机软件规划。首要包含CAN节点初始化、报文发送和报文接纳。
2.1 智能节点软件规划
由加速度传感器MMA6260Q采样来的模仿信号由LPC2119 A/D转化,经过有用数据查看、数字滤波、标度改换、线性化技能等处理,消除因为随机搅扰带来的差错,得到实践被测加速度的精确数值。LPC2119初始化完结以下使命:设置作业方法、接纳滤波方法、接纳屏蔽寄存器AMR和接纳代码ACR、波特率参数和中止答应寄存器IER等。体系设定作业频率为16MHz,波特率装备为1Mb/s。
2.2 报文发送和接纳子程序
CAN操控器有三个独立的发送缓冲寄存器,发送时要判别缓冲闲暇,本规划中,先判别榜首主发送缓冲区,然后进行数据格局转化,发动发送数据。报文发送、接纳数据流程如图6所示。CAN的发送和接纳子程序完结了CAN操控器的底层驱动。
报文发送函数原型:INT32U CANSendData(CANNUM CanNum,INT32U Cmd,*RxBuf),CanNum:CAN操控器;Cmd:发送命令字;RxBuf:发送数据指针。
接纳选用中止方法,为防止数据丢掉,在函数库中树立环形缓冲结构:
Typedef struct_RcvCANDataCycleBuf_{ INT32U WritePoint:8;ReadPoint:8; FullFlag:8;
stcRxBUF RcvBuf [CAN_RCV_BUF_SIZE];
}stcRcvCANCyBuf,*P_stcRcvCANCyBuf;
报文接纳函数原型:
void ReadCanRxBuf(CANNUM CanNum,stcRcvCAN CyBuf*RcvCyBuf)
CanNum:CAN操控器; RcvCyBuf:方针环形缓冲区指针。
2.3 iCAN协议报文接纳处理
智能节点有必要契合iCAN协议报文的格局,先要把CAN的数据转化成契合iCAN协议格局的报文,再经过CAN的收发子程序发送和接纳,iCAN报文的接纳处理流程如图7所示。
体系选用iCAN总线技能及协议规划,完结了轿车驾驭状况——方向盘、油门、刹车和ECU操控等信息收集和处理。与以往的体系比较,其最大特点是进步了各丈量节点的精度和稳定性以及体系数据通讯的速度并增强了抗搅扰才能。