1 规划概述
1.1 规划意图
机器人的呈现和开展是计算机技能进步和自动化研讨 不断深入的成果。工业机器人的发生进步了人类社会生产 力,极大地改变了工业生产和人类日子样貌。但现有机器人 一般体系较为杂乱,而且本钱贵重。
本项目中咱们规划了一套依据Linux 操作体系的FPGA- HPS数据交互联合求解魔方的智能魔方破解渠道。项目在 FPG A部分使用CCD摄像头辨认获取魔方54个小色块的颜 色,经过lw_AXI_FPGA-to-HPS Bridge送到HPS部分,HPS收 到一切54个色块的色彩之后,使用咱们独立规划的魔方求 解算法进行求解得到复原该魔方的过程,再经过lw_HPS-to- FPGA Bridge送到FPGA部分,从而操控舵机来操作破解渠道 上机械手臂旋转弹性,复原魔方。本体系的首要研讨成果包 括:依据Verilog言语的色彩辨认算法、多功用VGA显现、独 立自主规划的魔方求解算法、安稳灵敏的机械结构。
1.2 适用范围
现在,市场上的机器人都是依照固定的过程完结相应 的功用,当外界环境呈现变化时,机器人就无法完结该功用 了,针对该问题,本著作运用FPGA视频处理技能,对周围 环境进行实时监控,然后再进行相应的操作,大大进步了工

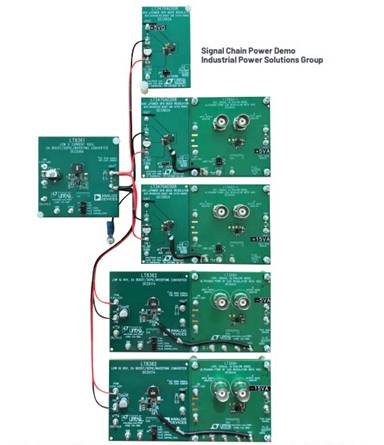
图1 体系什物图

图2 图画收集和辨认功用

图3 数码管显现作用图
作功率,凸显了机器人像人相同的才智、灵动。 在实时监控的一起,咱们的著作也具有很高的观赏性。魔方自身就具 有很强的吸引力,再加上这个具有人功用的机械外观,必定 显得独具匠心。
1.3 本规划选用SoC器材的优势
(1)在DE1-SoC开发板上搭载带有图形界面的Ubuntu系 统,能有效地进步CPU的使用率,简化杂乱体系的开发问 度。
(2)DE1-SoC嵌入了ARM-9双核处理器,运算速率高,
适合做算法,能对咱们的求解魔方算法进行快速处理。
(3)在ARM上能够开发使用程序来作为操控台, Linux平 台有多种图形库可供挑选,让咱们的使用程序愈加漂亮,具 有更高的观赏性。
2 功用描绘
本规划选用DE1- SoC作为开发渠道,成功完结了依据 Linux操作体系的FPGA-HPS数据交互联合求解魔方的智能魔 方破解体系。体系什物图如图1所示。
体系环绕“色彩辨认,魔方求解”完结以下功用
2.1 图画收集和色彩辨认(Verilog言语编写)
在辨认模式下,显现屏将在固定区域呈现9个方框,用 于指定图画收集区域。经过调整魔方 的方位,使魔方某面的9个色块均坐落 方框内。色彩辨认算法对方框内的图 像信息进行实时辨认。辨认成果会在 液晶屏幕右边的魔方平面打开图中呈 现。魔方打开图中的9个色块与实践的
图4 多功用VGA显现 作用图
9个色块共同, 即完结了图画收集和色彩辨认功用,作用如图2。
2.2 破解复原魔方功用
将 C C D 摄 像 头 识 别 到 的 颜 色 数 据,经过DE1- SoC上的LW FPGA-to- HPS Bridge将数据传送给HPS,然后 经过写入在HPS里边的魔方破解算法 得到破解该魔方的算法, 再经过LW HPS-to-FPGA Bridge将破解复原魔方 过程输出,操控PPGA的GPIO,到达 破解魔方的意图。
2.3 数码管显现
体系得到破解魔方的算法后,将破解该魔方所需的总
步数经过数码管显现出来,破译机器人每按算法操作一步, 数码管显现的数值就会减1,直到数码管显现为0时,魔方算 法履行结束。作用如图3。
2.4 多功用VGA显现
在液晶显现屏的右边区域制作出魔方6个面54个格子的 打开图,CCD摄像头辨认好什物魔方的色彩后就会将色彩 制作在打开图的各个方框中,呈现出紊乱魔方的六个面的展 开图。详细完结作用如图4。

图5 机器人硬件建立

图6 DE1-SoC开发板资源使用情况
图7 体系总体规划框图
2.5 机器人硬件的建立
使用两个舵机来完结弹性和旋转,然后使用四个机械 手臂来完结这个机器人体系建立,经过结构来固定这四个机 械手臂,完结机器人安稳灵敏地破解魔方,详细完结作用如 图5。
3 性能参数
3.1 各模块性能参数
(1)DE1-SoC主控板 直流电压:9V 体系频率:CPU作业频率:100MHz (2)CCD摄像头 输入电压:12V TV制式:PAL 作业温度 : -20℃~70℃(3)MG996R舵机 尺度:40.8*20*38mm 分量:55g 速度:4.8V@0.20sec/60°6.0V@0.19sec/60° 扭矩:4.8V@13kg-cm 6.0V@15kg-cm电压:4.8V-7.2V
( 4 ) D C -D C 电源 输入电压: 9 ~ 1 6 V 输出电压:6.0~7.4V 体积:40mm*30mm*20mm (5)视频接口解码芯片:ADV7123 作业频率:25MHz 显现分辩 率:640*480
(6)魔方
魔方品种:三阶 魔方尺度:52mm
魔方分量:0.1g
(7)SD卡
类型:Sandisk/闪迪 容量:8G
读写速度: UHS-1 文件体系:FAT163.2 开发板使用情况DE1-SoC开发板资源使用情况(如图6所示)。4 规划结构
4.1 体系功用规划
体系总体规划框图如图7所示。
4.1.1 HPS部分
在H P S 部分, 分为四个过程: 操控F P G A 完结色彩识 别->获取魔方色彩->魔方求解->发送求解过程到FPGA舵机操控模块。
第一步,经过lw_AXI_FPGA- to-HPS Bridge操控FPGA部分的色彩 辨认模块和舵机滚动模块,按必定 的次第滚动魔方,对其六个面顺次 进行指定区域的RGB获取。
第二步,六个面一切小色块的RGB获取完结后,HPS对每个小色 块的色彩进行判别,得到精确的颜 色。第三步,依据魔方六个面的色彩,使用咱们独当一面 规划的魔方求解算法得出复原魔方的过程。
第四步,得到过程之后,经过lw_AXI_HPS-to- FPGA Bridge发送给舵机滚动模块。