摘要:本文论述了该雷达探测器的数字信号处理进程,要点剖析了动方针主动检测原理,并给出了该检测算法的完结进程。依据该雷达探测器的特色和需求,规划了依据DS尸的操控与信号处理体系,详细给出了其软、硬件完结计划。该体系具有高性价比以及较好的通用性,现已成功使用于项目。
导言
调频接连波(FM—CW)雷达设备简略,发射频谱窄,发射峰值功率与均匀功率适当,不存在近距离肓区和速度含糊,而且还具有近距离信号按捺功用等长处,因而选用该技能规划地上近程雷达探测器具有很强的优势。假如想发挥FM—CW雷达的优势,就要具有相应的数字信号
处理功用。
本文针对选用I、Q解调零拍接纳技能的FM—CW雷达规划,以数字信号处理器(DSP)芯片为根本运算单元,以单片机为主操控器,结构了灵敏、操控与处理能力强、通用性好、性价比高的操控与信号处理体系。该体系经过对方针多普勒回波信号进行滤波、相干堆集等处理完结动方针主动检测进程和人机交互。
1 数字信号处理
本文触及的FM—CW雷达探测器首要功用是检测动方针而且核算动方针运动的速度和方向(朝向或远离雷达站)。I、Q回波信号经过正弦解调后得到I、Q多普勒信号,数字信号处理器(DSP)经过对I、Q多普勒信号的剖析处理完结动方针检测,其完结进程如图1所示。
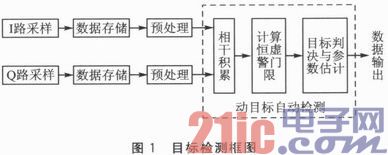
对I、Q两路信号先后同步采样,并把数据保存至相应的数据存储空间,采样完一帧数据后,DSP别离取出存储的两路N阶FFT数据进行预处理(首要是进行数据转化、去直流运算);然后对I、Q信号进行相干堆集,取得相应的堆集增益,然后针对功率谱散布状况,核算恒虚警率门限进行恒虚警率处理(CFAR);最终把最大的子滤波器功率值和核算的恒虚警率门限比较,若小于门限值,则以为没发现方针;反之,则以为发现方针,一起核算该方针的参数信息(包括速度、运动方向、相对起伏等),并依照规则的协议对方针参数信息打包输出。
1.1 预处理算法
当选用单电源进行A/D转化时,在模仿端不可避免的存在直流重量,而直流量的存在将下降数字信号处理的动态规模,因而下降直流重量很有含义。使用数字处理简单完结,其进程如下:
①依据下式别离核算I、Q数据的数学希望E1(x)和EQ(x)。

其间,N标明一帧数据的个数,xi标明第i个数据。
②依据公式yi=xi-E(x)(i的取值规模[0,1]),将I、Q数据别离减去数学希望值E(X),得到新的I、Q数据帧:
1.2 动方针主动检测
动方针主动检测首要包括相干堆集、恒虚警率处理(CFAR)和方针判定与参数估量等进程完结。
1.2.1 动方针检测根本原理
众所周知,多普勒频率在雷达中方针的径向速度和回波多普勒频率存在如下所示的联系:
式中:c=3.08×108m/s;标明雷达的作业频率;fd和Vd别离标明方针的多普勒频率和方针径向速度。
依据式(3)可知,只需核算出多普勒频率fd就可取得方针的径向速度,而且经过fd能够判别是否发现方针。
雷达的多普勒效应标明:当方针朝向雷达站运动时,多普勒频率(fd)为正值,而当方针远离雷达站运动时,多普勒频率(fd)为负值,因而能够经过fd值的正负来确认方针运动方向。
为了完结方针多普勒回波相干堆集,并核算其频率值巨细和正负,选用快速傅里叶变换(FFT)办法完结,而且FFT技能完结N(一帧数据长度)个滤波器组(也称子滤波器),核算量小,便利硬件完结,是可行的。
1.2.2 动方针主动检测算法完结
雷达的作业环境布景非常杂乱,回波信号中包括很多的随机噪声、杂波信号以及其他电磁波的搅扰信息。现在的雷达探测器(体系)都要求能够在杂乱和不确知的布景环境中检测方针的存在并坚持给定的虚警概率。为此,有必要主动实时核算恒虚警门限以坚持恒虚警率完结。
算法完结进程如下:
①对新的I、Q数据帧组合成复数,然后进行FFT运算,并对各子滤波器信号幅值求模。
②找出信号起伏前4的4个子滤波器并符号其滤波器方位(Mj)和起伏巨细(VMj),而且把信号起伏最大的滤波器进行二次符号(滤波器方位为Mmax,信号起伏为Vmax)。
③依据式(4)求一切子滤波器的数学希望E(xx)和均匀方差σ2,去除幅值最大的前4个数据有利于削减信号闪耀。
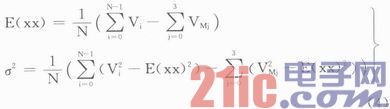
式中:N标明子滤波器个数(参加FFT运算的数据帧长度);Vi标明第i个滤波器的信号起伏。
④依据式(5)核算恒虚警率门限VT。
VT=αE(xx)+βσ2 (5)
式中:α、β标明加权系数;α、β值决议了方针判定门限VT,VT的详细值需求结合发现概率和虚警概率确认。
⑤把最大的信号起伏Vmax与恒虚警率门限VT相比较,若不小于VT值则以为方针存在,而且由Mmax值估量多普勒方针频率,然后依据式(3)确认方针的径向速度;一起也能够依据Mmax值确认方针远离或接近运动,当Mmax
2 体系规划
该操控与信号处理体系规划准则:牢靠安稳、性价比高、小型化。其总体规划如图2所示。
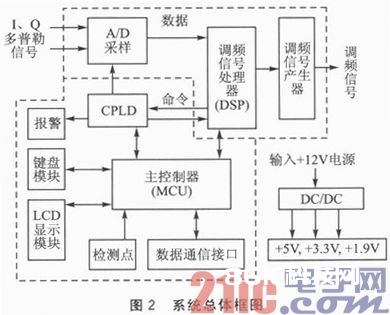
该体系首要是针对某类型FM—CW雷达探测器规划的,首要分为主操控器部分、调频信号处理部分和DC/DC电源。其作业流程:DSP操控模数转化器(A/D),对I、Q多普勒信号进行同步采样,一起把收集的数据保存在片内存储器中,直到一帧数据收集完结;DSP对该帧数据进行滤波、动方针检测算法处理,处理完结后把方针数据送至主操控器;主操控器(MCU)接纳到方针参数信息后,依照规则的协议把方针参数信息打包并经过数据通信接口输出,一起依照预订的要求向CPLD输出操控信号,MCU还应及时接纳键盘模块输出的数据和按周期收集各个检测点的数据,而且操控LCD显现模块正确显现各种状况;数据通信接口选用RS23协议。
CPLD首要是对操控指令进行译码和逻辑运算,依照正确的逻辑时序操控A/D采样和报警电路。
DC/DC电源部分,外部输入+12 V的电源电压,经过多个集成电源芯片别离发生+5V、+3.3 V、+1.9 V电压供体系作业。
2.1 主操控部分
主操控器部分,包括类型为C8051F023的单片机和类型为EPM3064的CPLD,其首要功用如下:
①操控体系自检。包括电压、电流检测、高频发射源和高频接纳模块作业状况检测。
②完结对键盘模块办理、对LCD显现模块的操控。
③对数字信号处理的办理,并从信号处理器获取方针参数信息。
④对方针信息进行二次处理并进行数据打包,经过数据通信接口发送,从数据通信接口接纳外部指令并进行相应操作。
⑤完结对DSP操控指令的译码和操控报警电路作业(首要由CPLD完结)。
2.2 数字信号处理部分
数字信号处理部分首要包括A/D采样、数字信号处理和调频信号发生器。其间A/D采样选用类型为MAX1306的芯片完结,数字信号处理选用类型为TMS320F2812的32位DSP完结。
调频信号发生器首要使用DDS技能,选用类型为AD9850的芯片完结。该部分的中心功用是参阅图1完结动方针主动检测运算,数字信号处理器(DSP)软件流程图如图3所示。
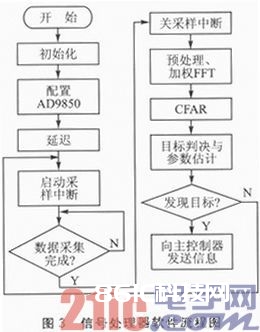
DSP开机上电复位后,初始化本身的装备,使得体系进入预订的作业状况;在正常作业状况形式下,依照AD9850的参阅协议(本文选用的是串行3线制)装备寄存器,发生所需求的正弦调频信号,然后推迟等候;
直到雷达探测器高频部分作业安稳后,DSP发动采样中止,依照设定的周期操控A/D收集数据,直到I、Q两路别离收集完结1 024点数据(一帧),DSP封闭采样中止,然后数据进行处理完结动方针检测进程。首要DSP对收集的I、Q两路数据进行预处理,接着使用海明窗函数进行
加权并完结复数FFT运算,对运算成果做恒虚警率处理(CFAR),核算出恒虚警门限值,然后进行方针判定得出有无方针的定论。
若发现方针,则将方针的速度、运动方向、信号相对强度送至主操控器,最终重新发动数据采样,进入下一次运算。
结语
本文选用DSP十MCU+CPLD方法完结的操控与信号处理机现已成功使用于某类型FM—CW雷达探测器上,具有成本低、功能较高且使用灵敏等特色。该体系也能够使用于其他范畴窄带信号的处理,具有较好的通用性。