部件抓取是工厂主动化中最重要的使用之一。与传统的人工处理和半主动运送比较,选用灵敏的机器人来完结这项使命将是性价比更高的一种挑选。那么,针对机器人引导的部件定位设备需求满意牢靠性高、输出成果具有可重复性的功用,一起有必要简略易用。
根据3D视觉技能的部件定位传感器在处理以下疑难杂症时具有极佳的灵敏性,其间包含:
·摆放方位不准确的部件载具
·受损的部件载具
·托盘上歪斜放置的堆叠物
·传输过程中部件方位产生偏移
·质料出产的公役
来自SICK的PLR传感器专为高效、准确的机器人引导而规划,它调集了一系列针对视觉引导的要害特性:
·单机运转
·牢靠性高
·处理速度快
·简略易用
·节约本钱

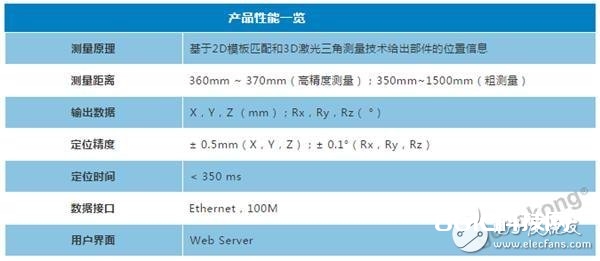
PLR专为机器人主动物料运送而研发。它是一款单机设备,包含了一切的定位功用,集成了简略易用的机器人接口,能够快速与机器人完成衔接。PLR结合了最先进的2D和3D机器视觉技能,供给绝无仅有的解决方案,即便周边环境产生变化也能够牢靠检测。
集成的Web服务器供给免设备的用户操作界面,极大的缩短了调试时刻。PLR能够很简略的集成到已有的机器人体系和运送站,无需额定预备上位机体系,也无需专业的视觉技能人员。只需简略的设备操作,然后将PLR衔接至机器人控制器,导入现有的作业装备或新创建一个装备,仅需几分钟即可预备就绪。


在物流运送的各种出产环节中,PLR的特性使其尤为适用定位一些大略放置的大尺度、大体积的金属部件。出产过程中这些部件一般放置在载具上,载具在运送和操作过程中方位或许产生变化,极点状况下载具甚至会产生损坏或形变。因而,在特定方位准确放置载具往往会变得十分困难。引进根据PLR的机器人引导技能能够供给极大的灵敏性来战胜这些问题,一起能够保证快速的部件抓取。
来历;我国工控网