


摄像头是ADAS中心传感器,比较毫米波雷达和激光雷达,最大优势在于辨认(物体是车仍是人、标志牌是什么色彩)。汽车行业价格活络,摄像头硬件本钱相对低价,由于近几年核算机视觉开展迅速,从摄像头视点切入ADAS感知的创业公司数量也十分可观。
这些创业公司能够统称为视觉计划供给商。他们把握中心的视觉传感器算法,向下游客户供给车载摄像头模组,芯片以及软件算法在内的整套计划。前装形式下,视觉计划供给商扮演二级供货商的人物,与Tier1配合为OEM界说产品。后装形式里,除了供给整套设备,也存在售卖算法的形式。本文中将对视觉ADAS功用、硬件需求、点评规范等进行解析,在《【车云陈述】adas视觉计划入门盘点(下篇)》内容中将参阅Mobileye对国内11家供货商的产品进行具体解读。
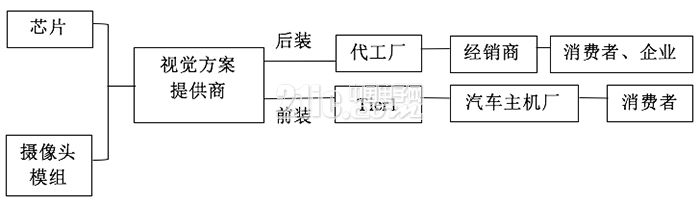
视觉ADAS供应链系统一、视觉ADAS可完结功用
由于安全记载、泊车等需求,摄像头在车上的许多运用是行车记载仪、倒车印象等辅佐功用。一般经过装置在车身各个方位的广角摄像头收集印象,经过标定和算法处理,生成印象或拼接构成视图弥补驾驶员视觉盲区,不必触及整车操控,因而愈加重视视频处理,技能现已老练并逐步遍及。
现在在行车辅佐功用中,摄像头可用来独自完结许多功用,而且依照自动驾驶开展规律逐步演进。

这些功用愈加着重对输入图画的处理,从拍照的视频流中提取有用方针运动信息做进一步剖析,给出预警信息或直接调集操控组织。比较视频输出类功用,着重高速下的实时性,这部分技能正处在开展上升期。
二、视觉ADAS软硬需求
视觉系ADAS产品由软硬件组成,首要包含摄像头模组、中心算法芯片以及软件算法。硬件方面考虑行车环境(轰动、高低温等),大前提是要契合车规级要求。
(一)车载ADAS摄像头模组
车载ADAS摄像头模组需求定制化开发。为了习惯车辆全天候全地利的需求,一般要满意在明暗反差过大的场合(进出地道),很好平衡图画中过亮或太暗部分(宽动态);对光线比较活络(高感光),防止给芯片带来太大压力(并不是一昧追逐高像素)。
摄像头模组是根底。比方一张根柢不错的相片才有润饰美化的地步,确保拍照图画够用的根底上,算法才干更好地发挥效能。
另外在参数上,ADAS与行车记载仪对摄像头的需求不同。用于行车记载仪的摄像头需求看清车头周围尽或许多的环境信息(后视镜方位看向两个前轮,水平视角约要110度)。ADAS的摄像头更考究为行车时预留更多判别时刻,需求看得更远。相似相机镜头广角和长焦,两项参数不能兼得,ADAS在硬件选取时只能取其平衡。
(二)中心算法芯片
图画相关算法对核算资源有很高的要求,因而芯片功能考究。如果在算法上叠加深度学习来协助辨认率提高,对硬件功能的要求只增不减,首要考虑的功能指标是运算速度、功耗、以及本钱。
现在用于ADAS摄像头的芯片大都被国外独占,首要供货商有瑞萨电子(Renesas Electronics)、意法半导体(ST)、飞思卡尔(Free scale)、亚德诺(ADI)、德州仪器(TI)、恩智浦(NXP)、富士通(Fujitsu)、赛灵思(Xilinx)、英伟达(NVIDIA)等,供给包含ARM、DSP、ASIC、MCU、SOC、FPGA、GPU等芯片计划 。
ARM、DSP、ASIC、MCU、SOC是软件编程的嵌入式计划,FPGA由于对硬件直接编程,和嵌入式比较处理速度更快。
GPU 和FPGA并行处理能力强。图片这样的文本,特别在运用深度学习算法需求多个像素点一起核算,FPGA和GPU会更有优势。两类芯片的规划思路相似,都是为了处理许多简略重复的运算。GPU的功能更强但耗能也更高,FPGA由于编程和优化都是直接在硬件层面进行的,能耗会低许多。
因而在平衡算法和处理速度,特别是用于前装而且算法稳守时,FPGA被视为一个抢手计划。FPGA是个好选择。但一起,FPGA对技能要求也很高。原因在于核算机视觉算法是C言语,FPGA硬件言语是verilog,两种言语不同,将算法移植到FPGA的人既要有软件布景,又要有硬件布景。在人才最贵的今日,是笔不小的本钱。
现阶段可用于传统核算机视觉算法的车规级芯片有多种选择,可是适用于传统算法叠加深度学习算法的低功耗高功能芯片,还没有真实呈现。
(三)算法
ADAS视觉算法的源头是核算机视觉。
传统的核算机视觉辨认物体大致能够分为图画输入、预处理、特征提取、特征分类、匹配、完结辨认几个进程。
有两处特别依靠专业经历:第一是特征提取。在辨认妨碍时可用特征许多,特征规划特别要害。判别前方妨碍物是不是车,参阅特征或许是车尾灯,也或许车辆底盘投在地上的暗影等。第二是预处理和后处理,预处理包含对输入图画噪声的滑润、对比度的增强和边际检测等。后处理是指对分类辨认成果候选进行再处理。
科研中的核算机视觉算法模型运用到实践环境中,不一定就能体现得很好。由于科研得出的算法会添加比方气候、路途杂乱情况在内的条件约束,实际国际里除了重视杂乱环境的算法体现,还要考虑各种环境下算法的鲁棒性(是否安稳)。
算法上比较重要的一个改变是深度学习的浸透。
深度学习让核算机模仿人类考虑的神经网络,能够自己学习判别。经过直接向核算机输入标定后的原始数据,比方选择一堆异形车图片,然后丢给核算机让它自己学习什么是一辆车。这样就能够免除核算视觉特征提取、预处理等进程,感知进程能够简化为输入图片-输出成果两步。
业界比较共同的观念以为,在感知方面,深度学习将会弯道超车传统视觉算法。现在深度学习的算法模型现已开源,而且算法品种不多,因而有下降门槛许多优异成果出现的或许。可是受限于没有适宜的车端渠道,离产品化还有一段距离。
业界对深度学习在ADAS运用的观念都比较客观镇定。不少观念以为深度学习算法是一个黑箱(Blackbox)算法,相似人理性决议计划的进程,能够很快输出一个成果,很难在产生事端后反查原因,因而在运用深度学习时要参加理性决议计划部分,而且分区块规划。






