


导言:
跟着电子技能、核算机技能和制造技能的飞速开展,消费产品出现光、机、电一体化、智能化、小型化的趋势。各种智能化小车在商场玩具中占一个很大的份额。传统玩具的商场比重正在逐渐缩水,高科技含量的电子玩具欣欣向荣,日益成为电子玩具职业的开展干流。智能操控与传统操控有机的结合起来,扬长避短,进步全体优势,更好地满意人们的需求。智能技能必将迎来它的开展新时代,因而,咱们规划了这款智能小车。
1、机械部分总计划
在小车的机械要求确保预订的功用的前提下,咱们还考虑到小车的经济、牢靠、外形漂亮,功能好、赋有时代特点。
转向组织与驱动体系的规划是至关重要的。为了确保小车转向时精确、活络、牢靠性高且在转向时小车前轮纯翻滚而无滑动,运用阿克曼原理及解析算法,规划出等腰梯形的双摇杆组织,小车的完美转向变为实际。
1.1、机械操控原理
在以单片机为中心的操控下,直流减速双电机驱动小车后轮,舵机经过等腰梯形双摇杆组织操控小车转向。
如图一所示:

图一:机械操控原理图
1.2、阿克曼原理:
如图二所示:
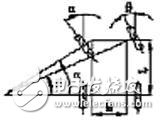
图二:阿克曼原理示意图
转弯时因轮距与轴距的联系,两前轮转角不同,内侧轮转向角比外侧转向角大,要使车辆转向顺畅,车轮在地上纯翻滚而不发生滑移,有必要使一切车轮都绕同一瞬时翻滚中心翻滚,两前轮转轴延长线与后轮轮轴延长线交与一点,这是阿克曼原理。此刻,转向的表里轮转角联系为 :
ctgβ-ctgα=M/L
由解析法核算等腰梯形双摇杆组织连杆、连架杆长度:
已知连架杆AB的三个方位与连架杆CD的三个方位相对应,即三组对应方位为

,用解析法规划该四杆组织。
树立直角坐标系,如图所示,和别离为AB和CD的初始角,各杆长度别离用矢量和表明。将各矢量别离在轴和轴投影,得到投影方程


在上述方程中消去并收拾,可得与之间的函数联系

在上式中令:
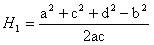

经过化简可得到:

将两连架杆对应的参数别离代入到方程得到,再依据其他条件选定机架长度,据此,可求出其他杆的长度
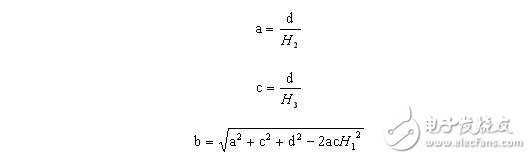
有了小车的驱动结构和转向结构,将小车其他零件装置好,可得到小车的装置图,如图三:
图三:小车全体装置图
2、电路部分全体计划
智能小车选用52单片机作为操控器,经过操控电路操控舵机转向和直流减速电机的转速、翻滚方向,使小车能够走直线和转弯。运用集成的红外对管GP2A25来巡线,装置在车子前方,并排装置三个,收集路面信号反应给单片机,再由单片机操控电机的翻滚和方向的调整,然后抵达巡线的作用。整个小车还选用金属传感器来辨认小车巡线上的金属。
整个小车的结构图如图四所示:
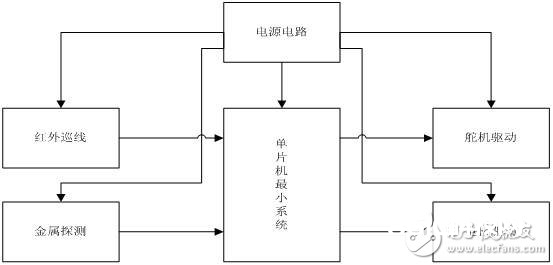
图四:电路部分总计划图
下面别离评论以上五个模块。
2.1、单片机最小体系
单片机要能够作业,有必要加上晶振和复位电路,假如用到P0口的话还得给其加上上拉电阻,确保通电后P0为高电平。别的还得有给单片机烧写程序的下载器,这个教师已给。单片机是此电路的中心部分。规划选用的52单片机,其作业电压为5V(20引脚接5V,40引脚接地)。单片机依据程序输出逻辑电压然后完结操控作用。本规划运用单片机的P0.5到P0.7引脚来作为红外巡线的反应操控引脚。P0.4为金属传感器的操控端口,只可惜时刻上不允许咱们把金属勘探的功用做出来。P2.0到P2.3,为直流减速电机的操控线接口,能操控左右电机的正转、回转和停转;P2.4和P2.5为电机的使能端接口,别离操控左右电机的转速。P2.6为舵机的操控线接口,经过操控占空比来操控舵机的转向及转角巨细。电路图如图五:
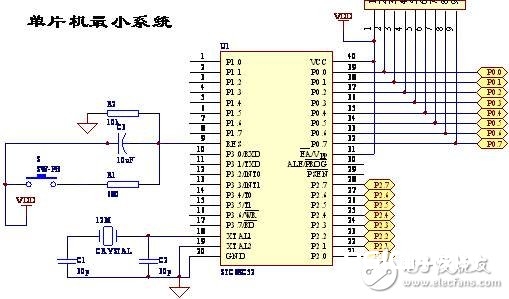
图五:单片机最小体系
2.2、电源模块
首要单片机用到的是5V的数字电,而电机驱动要用到L298的芯片,这种芯片用到12V的模仿电压,驱动舵机用到的又是5V的模仿电压。这就用到了三种电压。我手上有一块12V的电池,能够供应L298作为电机驱动的电源。然后我挑选L7805来得到5V的模仿电压。终究供应单片机的也是此电压,然后把数字地和模仿地共地,然后得到了整个智能小车的全体供电体系。可是因为数字电和模仿电共在一同,搅扰很大,体系的作用并不是很好。电路图如图六:
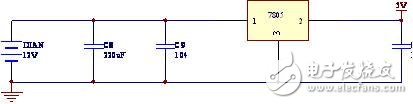
图六:电源模块电路图
2.3、直流电机驱动模块
电机驱动咱们挑选芯片L298,当然在单片机和L298之间咱们加了光耦,用来阻隔数字电路和模仿电路。规划选用的光耦是TLP521-4,它主要由发光二极管和光敏三极组成。其作业原理如下:当光耦的输入端(如IN1)接纳到高电压时,发光二极管没有导通不发光,光敏三极管呈高阻态(能够以为其为断路),此刻输出端(如OUT1)输出高电压;当光耦的输入端接纳到低电压时,发光二极管导通发光,光敏三极管导通呈低阻态(能够以为其短路),此刻输出端输出低电压。由此能够看出经过光耦能够顺畅地将数字电路的逻辑电压信号转化到模仿电路中。而L298是双H高电压大电流功率集成电路。直接选用11L逻辑电平操控。能够驱动继电器、直流电动机、步迸电动机等电理性负载。在此电路中L298衔接维护电路依据单片机供给的逻辑电压对电机进行驱动。详细驱动办法如下:当使能端为高电平时。输人端1N1(IN3)为高电平信号,IN2(IN4)为低电平信号时,电机正转;输人端INl(IN3)为低电平信号,IN2(IN4)为高电平信号时,电机回转;INl(IN3)与IN2(IN4)相一起,电机快速中止。当使能端为低电平时。电动机中止翻滚。电机驱动选用的是PWM(脉宽调制)的办法。这是单片机上常用的模仿量输出办法,经过外接转化电路,能够将占空比不同的脉冲转化成不同的电压,以驱动直流电机翻滚然后得到不同的转速。PWM波的占空比越大,电机翻滚速度越快,当占空比抵达100%时,速度抵达最大。电路图如图七所示。
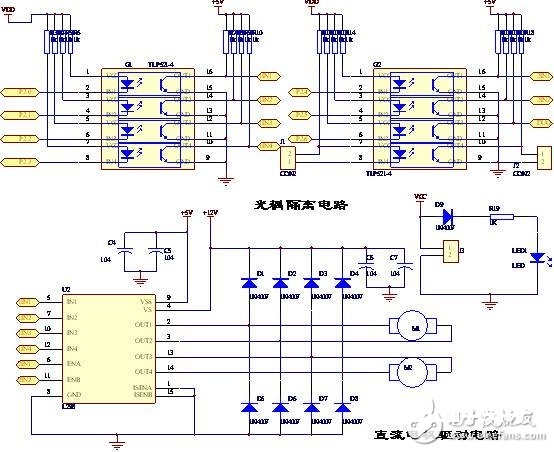
图七:电机驱动电路和光耦阻隔电路图
2.4、舵机驱动
舵机驱动咱们挑选的是单片机的P2.6端口,在接到舵机之前咱们也用了光耦来阻隔数字电路和模仿电路,如图七所示。而舵机的衔接电路也很简单,只是只要三根线:红线接5V电压,黑线接地,白线为信号操控线,接入单片机即可。舵机的内部有一个基准电路,发生周期为20ms,宽度为1.5ms的基准信号,将取得的直流偏置电压与电位器的电压比较,取得电压差输出。终究,电压差的正负输出到电机驱动芯片决议电机的正回转。当电机转速一守时,经过级联减速齿轮带动电位器旋转,使得电压差为0,电机中止翻滚。接口衔接图如图八所示。
2.5、红外勘探电路和金属传感器电路
红外勘探选用的是GP2A25集成红外对管。其作业原理是当其检测到黑线,即发射管发射的信号被黑线吸收而不能接纳时单片机的端口得到一个高电平,否则为低电平。金属传感器的原理和红外对管的原理相差无几。接口衔接图如图八所示。
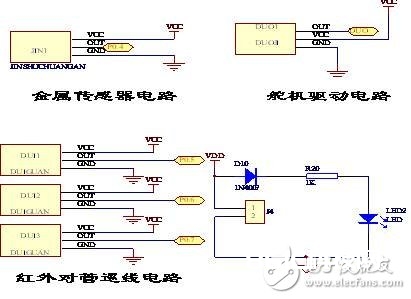
图八:舵机、红外以及金属勘探器接口电路
3、程序部分
我所规划的三个红外对管勘探地上的算法是:首要中心检测到黑线,则车直行,这时当黑线违背时,左右的红外对管都有或许检测到。到检测到就向相应方向转。这时黑线必将抵达中心的红外对管下面,车又直行。以下(图九)为程序流程图。
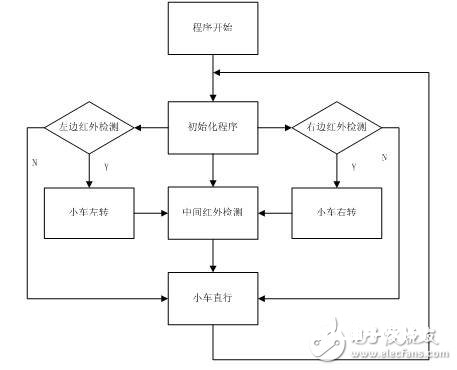
图九:程序流程图
程序有许多都是教师供给,只要红外巡线的程序是我自己编写,故我将此段程序写于附录之中。
4、调试部分
当电路板焊接好今后,首要是在不通电的情况下进行测验,看有无短路断路问题存在。还好,我此次焊接的电路板并没有这种问题。下一步便是通电测试了。主要是看单片机有没有起振,有没有开端作业,各管脚的电压值等等啊。还好,一切正常。第三步便是烧写程序今后的程序测验了。这也是消耗我最多时刻的当地。在测验中,我先是发现自己的电路数字电路和模仿电路的彼此搅扰特别严重,舵机在作业的时分会很颤。所以我把电路分脱离,从头测验。这时在测验的过程中我先后发现了其间一个直流电机存在问题,舵机也坏了。我又替换它们再次测验。
在整个测验过程中,我收成颇丰。从前没有调试过舵机,这次总算在自己的尽力和教师的不吝赐教下学会了怎么调试舵机。还有便是对整个电路体系的掌握上也得到了很大的进步。
5、总结
看到小车竞赛的视频或是现场的竞赛,勾起了儿时的夸姣回想,兴起了自己着手制造智能巡迹小车的想法。从前还以为小车的硬件部分应该是比较简单的,经过自己的实践才理解,从小车的全体构思规划到每个零件的规划和加工,都蕴含了机械规划的各项准则,满意功能要求,经济、牢靠、外形漂亮的许多约束。
在小车转向方面,咱们仔细研讨了阿克曼原理并查阅了相关的材料终究选用解析法确认了平面等腰梯形四双摇杆组织,完成了小车转向时活络、精确,纯翻滚无滑动的完美结构。
电路方面,咱们的收成也很大。不只训练了自己在电路板焊接、测验方面的才能,包含了查看过错,改正过错的才能;还学习了单片机的有关常识,这其间包含了直流电机、舵机、红外巡线等方面的常识。
附录:
1、 总电路图
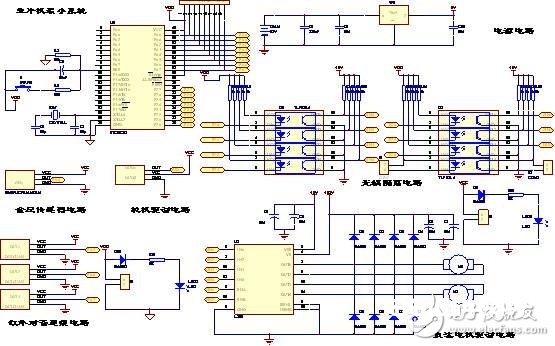
2、 机械结构总图






