


激光盯梢丈量体系(Laser Tracker System)是工业丈量体系中常用的一种高精度的丈量仪器,是近十年发展起来的新式大尺度空间丈量仪器,不仅对停止方针能够丈量,而且对运动方针也能够进行盯梢丈量。它调集了激光测距技能、光电技能、精密机械技能、核算机及操控技能等各种先进技能,对空间运动方针进行盯梢并实时丈量方针的空间三维坐标。它具有快速、动态、精度高级长处,适合于大尺度工件配装丈量。在航空航天、机械制造、核工业、现代军事等丈量范畴得到广泛的使用。该体系的盯梢精度在很大程度上依赖于转台的旋转视点的丈量精度。
为了进步体系转台旋转视点丈量的精度,本体系选用高分辨率的光电编码器来丈量视点。光电编码器是使用光栅衍射原理完结位移数字改换的,光电编码器作为一种高精度的测角传感器已遍及使用于伺服盯梢体系中,它具有精度高、呼应快、功用安稳牢靠等长处。光电编码器按编码办法首要分为两类:增量式与肯定式。因为增量式光电编码器成本低、测角的精度高,因而本体系的增量式光电编码器选用Renishaw公司的高精度圆光栅。
但是,因为机械振动或颤动等原因,增量式编码器的输出脉冲会呈现颤动毛刺的现象,因而需求在对编码器输出脉冲进行计数的过程中采纳有用的办法来去掉颤动搅扰。本文介绍的有限状况机办法,在FPGA上能够有用消除颤动引起的计数搅扰,进步计数的精度[1]。
1 方案规划
1.1 体系组成
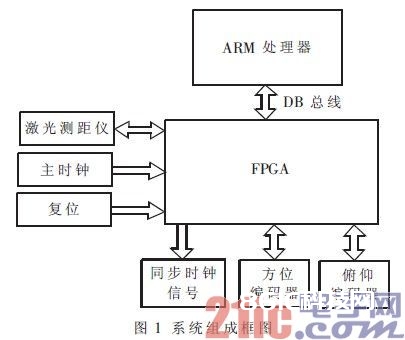
激光盯梢丈量体系的中心处理模块首要由ARM处理器,FPGA组成。为了充分使用ARM9微处理器的运算才能和FPGA的高速逻辑处理才能,在规划中对功用的完结进行了区分。ARM9 用于运动操控渠道的操控而且与FPGA一同构成一个完好的使用渠道。FPGA首要完结编码器的准确计数功用、与ARM9处理器数据通信、与激光测距仪数据通信功用。体系的组成框图如图1所示。本文要点介绍在FPGA上完结编码器的输出脉冲计数与视点丈量。
1.2 增量式编码器原理
增量型编码器一般有3路信号输出:A、B和Z,每路都是差分信号,共6路信号,信号选用TTL电平,A脉冲在前,B脉冲在后,A、B脉冲相差90°,每旋转一圈宣布一个基准脉冲Z,作为参阅机械零位。Z相的波形中心对准A相输出的波形中心。使用A相B相的相位差来进行判相,A超前B 90°为正转,反之B超前A 90°为回转。
因为增量式编码器不带回忆功用,因而对外界要素引起的搅扰十分灵敏,在实践使用中,因为机械振动、工作环境,电机负载等都无可避免地会发生轰动,编码器会在某一相的脉冲边际的当地呈现颤动的状况,因而有用滤掉脉冲的颤动和毛刺,是进步计数精度的关键技能。编码器输出实在信号的波形如图2所示[2-3]。

2 理论剖析与算法
2.1 有限状况机原理
在编码器的一个输出周期内,A、B两相输出信号共发生4个跳变沿,在A、B方波信号的上升沿和下降沿别离计数,然后完结四倍频计数的操作。本文经过有限状况机FSM,对原始信号进行四倍频采样操控,状况机外加的一路高速同步时钟信号作为状况机的驱动时钟信号,然后有用滤掉颤动搅扰。
有限状况机FSM(Finite State Machine)是一种时序电路,是数字体系中完结高效率牢靠性逻辑操控的重要办法。规范状况机可分为摩尔型Moore和米利型Mealy两种类型。Mealy状况机的输出是当时状况和输入信号的函数。在本规划中,对编码器输出信号进行计数,选用的计数器是双向计数器,既与当时编码器所处于的电平组合有关,又与前一个状况有关。因而本规划选用Mealy状况机。Mealy状况机比Moore状况机在状况切换时提早一个同步时钟, 因而具有较高的实时性。A、B两相信号转化状况如图3所示[4]。
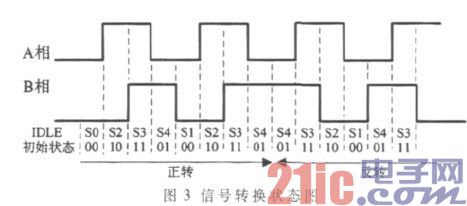
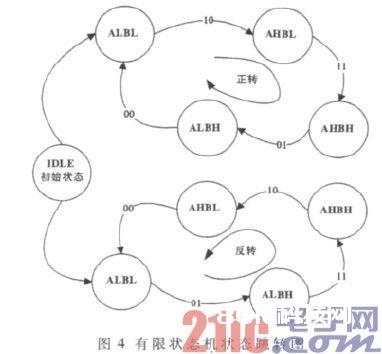
在抱负状况下, 若编码器正向旋转,A、B 电平的值为:00-10-11-01-00 ; 若编码器反向旋转, 则A、B 电平的值为:00-01-11-10-00 。但是在实践使用中, 输入脉冲含有颤动和毛刺,A、B 相脉冲的电平状况会在状况机中有用地跳转, 颤动之后, 因为计数器能够正反向计数,因而终究的计数值会坚持不变, 输出的成果也坚持不变, 达到了去颤动的作用。有限状况机设置了5 个状况:IDLE (S0) ,ALBL (S1) ,AHBL (S2) ,AHBH (S3) ,ALBH (S4) 。其间IDLE 为初始状况, 用于初始化计数器的计数器状况。状况机的状况空间跳转图如图4 所示[5]。
3 体系规划与完结
3.1 软硬件渠道
依据以上剖析,编码器输出的原始信号经过有限状况机处理后,得到了四倍频的输出信号。本体系选用FPGA完结四倍频操控和计数功用,与用分立器材构成的倍频计数电路比较,具有安稳度高,移植性灵敏,牢靠性好的特色。
硬件选用Altera公司的Cyclone系列FPGA芯片EP1C12Q240,编译环境为Quartus II 5.1集成开发环境。在Quartus II的开发环境中,能够经过两种办法来完结Mealy有限状况机。榜首选用硬件描绘言语,第二经过Quartus II中的状况机修改东西来完结。本规划选用硬件描绘言语来完结状况机规划。
3.2 程序规划
为了进步体系的有用性和安稳性,滤掉信号上的毛刺,在A、B相信号进入状况机前,先规划一个滤波器进行初度滤波,每个信号用4个D触发器和1个判定器来滤波;触发器由时钟SCLK驱动。小于一个SCLK时钟周期的毛刺,都被滤波器滤掉了。滤波器的原理图如图5所示[6-7]。

整个程序的规划是选用图形和言语相结合的办法来完结的。顶层规划选用图形文件,顶层模块的结构图如图6所示。
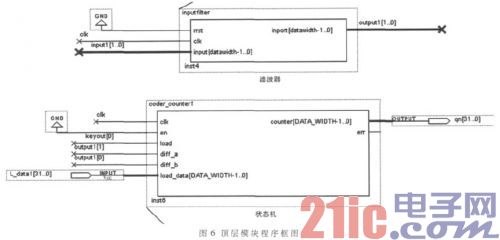
内部的状况机模块选用VHDL言语来完结。顶层模块包括两个模块,一个滤波器模块,该模块依据三选二判定的原理来滤掉毛刺;另一个模块是状况机模块,终究输出编码器计数的成果。Input[0]和input[1]输入引脚别离衔接增量型编码器A相和B相信号。q[31..0]为32位的计数器,输出当时编码器的计数值,dirout是编码器的旋转方向信号。
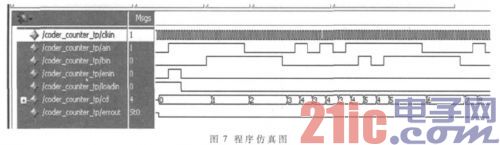
程序规划完结后,在仿真东西modelsim下进行波形仿真。仿真成果如图7所示。从图中看出,计数器能够完结正向与反向计数,能够有用滤除脉冲上的颤动,获得准确的计数值。
本文提出了一种根据有限状况机的高精度丈量体系,在FPGA上用有限状况机完结了编码器输出脉冲的去抖,并经过32位计数器完结准确计数。终究在ARM处理器上完结视点的核算。经过很多重复实验,实验成果表明本文介绍的办法具有精度高、成本低、接口兼容性高、牢靠性高、可移植性好等长处,能够有用按捺噪声搅扰,获得高精度的视点数据。该办法现已成功使用在激光盯梢丈量体系中,该技能的推行能够获得杰出的经济效益,具有重要有用含义。






