


摘要:针对智能小车在实践运用中的需求,规划了一种依据ARM和Linux的具有途径回忆循迹功用的智能小车。运用ARM和Linux操作体系,完结了对智能小车的超声波避障模块、电机等的操控。运用电子罗盘,完结了小车在无黑线状况下精确转向;运用超声波测距避障以及Linux文件体系树立和保存了智能小车运转的途径回忆库;经过读取回忆库的数据完结智能小车的循迹功用。成果表明,该规划计划能够很好地完结循迹功用而且对环境的适应性较强。
导言
智能车是近年来发展起来的一门新式的归纳技能,在军事范畴得到了广泛运用,而且在出产和日子中的运用也日趋遍及。
现在智能小车的自主移动办法有两种:循迹和避障。一般的循迹功用能够经过算法使其能精确地在黑线上跋涉,可是因为一些室内环境的要素,要施行黑线的安置并不符合实践要求。一般的避障功用仅仅是经过勘探前方障碍物而进行逃避,经过算法能够完结从动身点到定点的跋涉,可是算法运算量大且放在不同的环境,就需求更改程序,这对实践运用带来很大的不方便。
依据这种布景,规划了一种运用超声波测距避障功用以及Linux文件体系的途径回忆循迹智能小车,经过人为地设置障碍物来规划小车的行走道路,并将道路记载入库。小车只需读取库中的数据即可依照规划的道路跋涉以完结循迹功用,可脱节寻查黑线的循迹办法。当环境发生变化时,运用按键设置小车的作业形式,能够直接从头树立回忆库,无需更改程序,具有必定的实践意义。
1 整体规划
图1为本体系整体结构框图,主要由超声波测距模块与云台、S3C6410操控器、电机驱动模块、光电测速模块以及电源等部分组成。其间,电源用于完结对整个体系的供电,超声波测距模块与云台完结对小车运转状况的预判,电机驱动模块依据预判的成果履行相应的操作,光电测速模块用于PID操控的反应以及在转向时操控车轮运转的周数,S3C6 410操控器在移植Linux操作体系的基础上完结对各模块的操控并树立小车运转状况的回忆库。

2 体系硬件规划
2.1 操控器
S3C6410操控器是由三星公司推出的一款低功耗、高性价比的RISC处理器,它依据ARM11内核(ARM1176JZF—S),可广泛运用于移动电话和通用处理等范畴。操控器由中心电路板和主板两部分组成,中心板上规划有S3C6410、SDRAM存储电路、NAND Flash、1.25 V电源电路和处理器复位电路等,主板上规划有串口、网口、按键等。
2.2 电源与电机驱动模块
电源选用现有的锂充电电池供电,锂电池的电压约为7.2 V。电机驱动选用的是L298N驱动模块,该模块选用ST公司的L298N芯片,选用高质量铝电解%&&&&&%,可使电路安稳作业;能够直接驱动两路3~16 V直流电机,并供给了5 V输出接口,能够给5 V单片机电路体系供电,支撑3.3 V ARM操控,能够方便地操控直流电机速度和方向。
2.3 超声波测距模块与云台
选用US-100超声波测距模块,该模块可完结0~4.5 m的非触摸测距功用,具有2.4~5.5 V的宽电压输入规模,静态功耗低于2 mA,自带温度传感器对测距成果进行校对,一起具有GPIO、串口等多种通讯办法,内置看门狗,作业安稳牢靠。
云台选用SG90舵机,作业电压为4.8~6 V,无负载的状况下转速为0.12 s/60℃。操控信号由接收机的通道进入信号调制芯片,取得直流偏置电压。它内部有一个基准电路,发生周期为20 ms、宽度为1.5 ms的基准信号。将取得的直流偏置电压与电位器的电压比较,取得电压差输出。最终,电压差的正负输出到电机驱动芯片,决议电机的正回转。
2.4 光电测速模块
本规划中的测速模块选用槽型对射光电,只要在非通明物体中经过槽型即可触发(合作小车测速码盘20格运用)输出5 V TTL电平,选用了施密特触发器去颤动脉冲,十分安稳,用于小车测转速、测间隔等。
2.5 电子罗盘
电子罗盘选用霍尼韦尔HMC5883L芯片,该芯片带有数字接口的弱磁传感器,运用于低成本罗盘和磁场检测范畴,并顺便霍尼韦尔专利的%&&&&&%,包含放大器、主动消磁驱动器、误差校准、能使罗盘精度操控在1°的I2C系列总线接口。
3 回忆库的规划
3.1 智能小车避障计划挑选
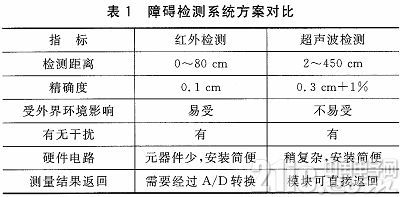
依据规划要求,小车内跋涉过程中需求精确地检测前方的人为障碍物,并经过障碍物的方位来确认小车下一步的运转状况,因而对丈量间隔有必定要求。障碍物检测能够有多种办法:红外光检测、超声波检测和机械触摸。这些办法各有优缺点,常用的有红外检测和超声波检测,两种计划的差异见表1。比照两种计划的目标后,本文避障计划挑选超声波检测,而且为了满意体系要求添加了SG90舵机作为辅佐,运用超声波能够检测多个方向。
3.2 智能小车的途径状况规划
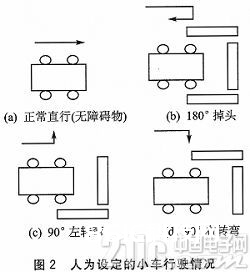
为了简化回忆库的规划以及结合实践运用中的状况,智能小车的运转状况设定成4种状况:直行、90°左转弯、90°右转弯和180°掉头。其间,直行状况在回忆库中的表明是时刻,经过Linux中的时刻函数丈量直行状况的持续时刻,单位为s。
为了使智能小车能依照上面的4种状况运转,智能小车内跋涉中遇到的途径状况是人为设定的,如图2所示。
3.3 回忆库的树立
智能小车的运转状况是人为设定的4种状况,回忆库中的数据便是由这4个状况标志组成。人为设置好从起点到结尾的障碍物后,即可让小车在起点开端运转,并在每次改动运转状况前将运转状况记载入库。在抵达结尾后以180°掉头作为完毕标志,然后运用Linux文件体系将回忆库里的数据保存到Linux下的一个文件傍边,到此完结回忆库的树立。






