1956年,恩格伯格和乔治迪沃尔发明晰第一个真实意义上的机器人,UNImate, 能够履行存储在磁鼓存储器中的体系使命。到1961年,Unimate现已被成功运用于压铸件的运送和焊接,传统上这样的作业由工人担任——冒着因排出气体中毒或损失肢体的风险。 Unimate是机器人用于风险使命场合的前期比如,现在,机器人体系现已被广泛运用于工业、农业、军事、航空航天、教育等各个范畴。
机器人分 类杂乱且关键技术很多,从广义范畴上说,一般所说的机器人首要包括教育机器人、移动机器人、工业机械臂三大类。机械臂开展时刻早,产业化程度高,相对现已有了老练的职业处理计划,特别在轿车制作等范畴,机械臂已被广泛的运用于产线安装。移动机器人构成杂乱、运用灵敏,现在商业化程度还不高,相对处于前沿研 究的阶段,因而一直以来都是科学家和工程师们重视的要点。本文将首要讨论移动机器人及无人驾驶车的研讨和开发。

图1 机器人体系的分类
尽管移动机器人构成杂乱且关键技术很多,但具有某些一起的构架和组成部分,是一个交融了很多机电体系和子体系的归纳体系,并经过这些组成部分与子体系的有机结合和谐作业,尽管部分子体系已有现成的软硬件东西和处理计划,但怎么快速地把各子体系集成在一起、进行前期的全体功用性验 证,就成了决议机器人规划胜败的关键性环节。
图形化体系规划——机器人规划的前沿办法
在Google X PRIZE安排、FIRST安排(科学技术的启示与认知安排)、RoboCup以及美国国防高档研讨计划局(DARPA)之间打开的竞赛推动了机器人学范畴的立异。赋有立异思想的开发者们将机器人学的前沿办法推动到了图形化体系规划。在LabVIEW图形化编程渠道下,机器人学的范畴专家能够对杂乱的机器人计划进行快速的原型规划。这些立异作业者能够不必关怀底层的完结细节,能够将注意力会集到处理手上的工程问题中去。
机器人规划一般包括以下部分的作业内容,如图2所示:
感知体系- 衔接到陀螺仪、CCD、光电、超声等传感器,获取并处理信息
决议计划规划- 相当于机器人的‘大脑’,依据算法进行操控决议计划,完结办理和谐、信息处理、运动规划等使命
履行操控- 依据详细的作业指令,经过驱动操控器、编码器和电机完结机器人的伺服操控与运动履行
网络通讯与操控- 机器人各子体系间的通讯网络,完结分布式操控与实时操控
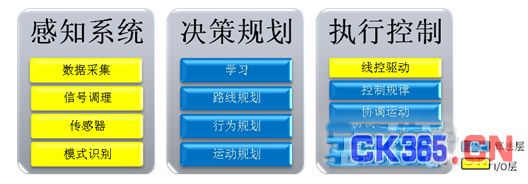
图2 移动机器人的规划渠道
曩昔,因为在每个范畴中有必要运用各自的传统东西,其间触及的常识具有较大的纵向深度,机械工程师、电气工程师以及程序员团队都各自领导机器人学的开发。LabVIEW和NI硬件供给了一个共同的、功用多样的渠道,它供给了一套规范的可供一切机器人规划人员运用的东西,从而使机器人开发得到了一致。
来自弗吉尼亚理工大学机器人学与机械实验室(RoMeLa)的工科学生,在Dennis Hong教授的领导下正在进行智能动态拟人机器人(DARwin)的双足类人机器人的开发和研讨,意图是对假肢进行研讨和开发。DARwin运用NI LabVIEW图形化体系规划渠道,能够完结全规模运动,而且能够精确地仿照人类运动。学生运用LabVIEW剖析动态双足运动、规划并开发机器人操控系 统的原型。假如开发的原型能够令人满意地作业,他们就将操控算法布置到运转LabVIEW实时模块的PC/104单板计算机上。
经过 LabVIEW,规划人员无需成为计算机专家或程序员,就能够开发高档机器人。例如,一位只要有限LabVIEW和机器视觉经历的学生在短短几个小时之 内,就规划了一个让机器人利用它带有的IEEE 1394相机和NI机器视觉开发模块盯梢一个红球的算法。工程师们运用LabVIEW和NI硬件,就能够运用功用强大的图形化编程言语快速地规划并开发杂乱算法的原型;并经过代码生成方便地将操控算法布置到PC、FPGA、微操控器或实时体系之中;还能够与简直一切的传感器、履行器进行衔接。此外,经过 LabVIEW和NI硬件渠道,能够支撑CAN、以太网、串口、USB等多种接口,方便地构建机器人体系的通讯网络。现在,范畴专家不仅仅能够完结机械工 程师的作业,还能够成为机器人规划者。
实例剖析1:南洋理工大学运用NI LabVIEW规划救生机器人蜘蛛
南洋理工大学开发了一个用于支撑解救作业的六足机器人蜘蛛。它是一个尺度较小、可移动的智能机器人,在搜索被陷的受害者时,它能够跳过妨碍并抵达一般难以触及的当地。代替如打扫雷区使之无雷化等风险使命中的作业人员也是机器人蜘蛛的另一个潜在运用范畴。
他们规划了一个高度可移动的行走计划,它由六只独立的下肢组成,能够恣意方向移动机器人,即便在机器人移动一般不可行或过于风险的地带。行走与旋转均归于仿照六足昆虫而得的根本的高层次运动形式。经过三条下肢移动而别的三条下肢举高,机器人能够到达希望的行走速度,并供给恶劣地带所需的满足平衡。匍匐 时,机器人能够揉捏经过紧凑的空间和狭缝。单下肢的低层次运动步态是3D空间内的几许原语,如长方形或圆形轨迹。

图3 根据NI LabVIEW规划的救生机器人蜘蛛