1 、导言
飞翔体姿势角的测验办法有很多种,如磁敏传感器、高速拍摄仪、加速度计法以及陀螺仪等。各种办法都有其长处及运用约束,适用于不同的运用场合。某小型飞翔体飞翔进程中所受过载较小,姿势角改变不大,可包容测验仪的空间有限,针对该小型飞翔器姿势角测验,提出了一种依据陀螺仪的姿势角存储测验办法,介绍了详细完成计划。
2、 姿势角测验体系规划
磁敏传感器法一般仅仅作为一种辅佐测验手法,高速拍摄法易受气候影响也约束了它的运用。加速度计法有着低成本、低功耗、高牢靠性等长处,可是理论核算及设备杂乱约束了该办法的运用,在国内多以理论研讨为主。而陀螺仪法在过载不太大的场合运用便利,成为此飞翔器姿势角测验的一个很好的挑选。飞翔体的姿势运动是飞翔体绕本身质心的滚动运动。在引进刚体假定和坐标系转化的概念后,飞翔体的姿势界说为飞翔体坐标系相对于参阅坐标系的旋转改换。
2.1 陀螺仪姿势角测验原理
在对刚体的滚动运动进行解析描绘时.常运用欧拉角或卡尔丹角。卡尔丹角适用于姿势角改变较小的场合,因而.用卡尔丹角进行描绘。取初始时刻飞翔体坐标系Oξηζ为固定坐标系,0xyz为与飞翔体固结的动坐标系。卡尔丹角选取的办法是,首要绕ξ轴转过α角,抵达0x1y1zl的方位;再绕y1轴滚动β角,抵达0x2y2z2的方位;再绕z2轴滚动γ角,抵达0xyz的方位。滚动联系如图1所示。
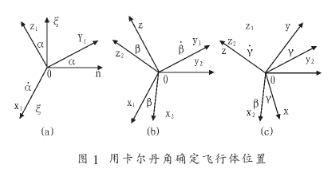
α、β以及γ分别为沿0ξ轴、0y1轴与0z轴的角速度重量,三次滚动如式(1)所示:
![]()
在此,以cx表明cosx、sx表明sinx,正切以tgx表明。各次滚动相应的方向余弦矩阵分别为

飞翔体的角速度ω,可以表明为:

式(7)为卡尔丹角表明的运动学微分方程,其间ωx、ωy及ωz分别为陀螺x轴、y轴及z轴的输出。积分此式,可得卡尔丹角。
2.2 体系完成
研讨存储测验技能之后,规划了存储测验体系。体积细小和丈量时不需求引线即不需求对外界的电磁辐射是他的最杰出特色。在动态参数的存储测验范畴,测验仪要随被测体一同运动,要求测验体系具有体积小、功耗低及抗高过载等特色,下面将结合体系规划论述这些要求的相应处理办法。
主控器材能否正常作业,是整个体系能否牢靠取得被测参数的要害。CPLD输入和输出引脚的原始电平可预先设定,开机即能到达预订电平,状况清晰。信号传输效率高,合适高速采样场合。可编程逻辑宏单元或逻辑块之间的彼此连线在同一封装内,受外界搅扰影响小,电磁兼容(EMC)性能好。综上所述,CPLD具有逻辑性强、呼应时刻快、程序不易跑飞等特色。为此选用CPLD作为主控器材,规划尽量简略牢靠的器材内部逻辑,以确保整个测验进程体系的正常作业。本体系存储容量为512 Kxl2 bit,负推迟为128 Kxl2 bit,采样频率为8 kHz。测验体系原理框图如图2所示。

存储测验体系包含:陀螺输出,信号处理(通道切换、信号适配电路、A/D转化器、数据存储器),体系操控(中心操控器、电源操控)和接口电路4个部分。对三维角速度信号选用的是接连采样的办法,需求进行通道切换。陀螺输出的是电压信号,可先进行通道切换再进行信号适配,这样电路板的面积可以减小,进一步减小测验仪的体积。通过通道切换顺次把传感器信号送至信号适配电路,经调度后送至A/D转化器,将模仿量转化为数字量,存入存储器。当触发信号到来后,测验体系记载完预设的容量,中心操控器给出模仿电源关断信号,电源操控器中止记载,测验体系进入省电形式。体系等候核算机发读数指令由接口电路将数据读出。规划了相应的接口电路,USB口和并口都可读取测验设备的数据。
2.3 体系抗冲击处理
测验体系作业全程要接受冲击过载,设备必需求进行抗冲击处理,维护测验设备,使其能在高冲击环境下正常作业。为了抗高冲击过载,专门选取了抗高过载的器材。其间最重要的主控器材选用XCR3064,抗高过载才能到达3×105g[6]。针对测验体系专门规划了抗冲击机械壳体,而且用环氧树脂对测验设备进行了真空灌封处理,将测验电路固结在电路维护壳中以抗高过载。通过上述抗高过载办法处理后,测验设备可以很好满意测验需求,确保了测验体系的正常作业,体系可重复运用。
3、 测验成果及实测数据剖析
存储测验体系现已成功运用于某小型飞翔体的试验,成功取得了测验数据。下面是实测曲线及其剖析,x轴为自转轴,z轴为飞翔方向。实测飞翔进程角速度信号如图3所示,图3中,3个轴的角速度曲线在70 ms处均有一个小鼓包,为陀螺的加速度效应在曲线上的体现。

陀螺仪测得的ωx、ωy以及ωz已知,依据表达式7所示的运动学微分方程,在MATLAB下解算出视点,如图4所示。经比照,与高速拍摄记载的姿势十分符合。

4、 结语
面向某飞翔体姿势角测验的实践需求,研讨姿势角测验技能,提出一种姿势角测验计划,剖析理论基础,作实践测验,试验成果表明,该计划可满意体系运用需求。
责任编辑:gt