


1 导言
轿车门锁具有类型标准多, 结构差异大, 检测项目多,部分结构松懈易变形的特色;轿车门锁安装检测出产线要求设备检测速度快、故障率低,并答应产品检测内容具有必定的扩展性。
曩昔大多选用将检测项分化到各分站别离检测的办法,这往往构成各分站设备结构杂乱,操作繁琐,设备规划周期长, 故障率高级缺点, 并且因车锁结构松懈不宜触摸, 某些检测需求依托人工目测, 不只操作员劳动强度大, 并且因存在人工要素, 简略犯错。
跟着工业化出产的开展,自动化设备的制作水平也日益进步,机器视觉(以下简称视觉)体系的引进很好地处理了这些问题。
2 视觉技能简介
视觉技能便是用机器代替人眼来做丈量和判别,它经过镜头(Camer a)吸取图画,并将像素的散布,亮度,色彩等信息,转变成数字化信号;图画体系对这些信号进行运算以抽取图画的特征, 并在此基础上完成模式辨认,坐标核算, 灰度散布图等多种功用, 然后进行逻辑判别,用以操控现场设备。
同人工检测比较, 机器视觉检测具有以下优势。
3 视觉体系的规划
3.1 硬件部分规划
(1) 图画收集部分:镜头PULNix TM-200,Cognex图画收集卡(可衔接4 组镜头);(2) 图画处理部分:PC 机(DELL GX5200);(3) 机电操控部分:SeaIO I/O 卡(PCI 插槽),操控柜(内置空气开关,接线端子等)构成电气操控体系;(4) 机电履行部分:按钮,传感器,气缸,阀岛,指示灯, 蜂鸣器等;(5) 人机交互部分:显现器,鼠标,键盘。
3.2 软件部分规划
本项目根据Cognex 的视觉剖析东西,自己开发了一套视觉操作渠道。
(1) 体系开发的软件环境。
Windows 2000 或Windows XP 以上操作体系;Office 2000 或以上版别;VisiONPro 50 或以上版别;SeaIO_v030103 或以上版别;VS2005TF。
(2) 软件开发的要求。
轿车门锁具有检测点多(本例共23 点),品种多的特色,这就要求软件能够将检测点自由组合到各个品种中去, 并且操作界面尽可能简捷, 易操作。
(3) 软件的功用。
图1 主界面
软件的主界面如图所示, 左边为当前车锁的类型、选用的镜头、运用的定位原点、和被检测点的概览。右侧为检测成果和设备状况等大略信息。中心部分上侧为体系检测的实践图画, 检测合格的用绿色边框圈定,不合格的用赤色边框圈定, 并配有被检测点的文字称号。该图画会默许显现为包括有检测成果中含不合格检测点的图画。在这一图画下侧有四个小的显现区域,别离对应于体系中不同的相机。假如该图画含有不合格点,则图画外侧会用赤色边框圈出。最下侧是各检测点的详细信息。如图1 所示。
此外,在主窗口中还有“输入显现”“, 手动操控”和“状况报警”特点页。在菜单“工程”中添加有“类型挑选”、“Camera”、“PMAlignFixture”、“Tools”“Type”、“视觉运转”选项。如图2 所示。
图2 工程子菜单。
软件为了削减调试工作量, 各被测点能够被装备在不同的视觉剖析东西里,假如每个检测东西只包括一个检测点, 那么当设置各个类型的检测内容时, 只需为每个类型选取对应的检测项即可,然后大大地进步了视觉调试的工作效率。如图3 所示。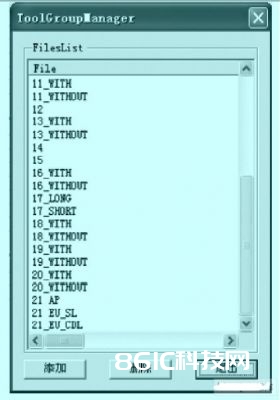
图3 对应检测点的检测东西(Tools )界面
软件现运用于常熟Kieker t 轿车门锁公司,运转安稳, 操作简略, 可满意出产及调试中的各种需求。
图4 为各类型分配检测项的界面
4 视觉技能在门锁检测中的运用
一套视觉体系的成功运用, 不只与软件的规划密不可分,更取决于视觉剖析东西的运用是否合理。关于不同的检测目标要具体剖析,采纳不同的检测计划。下面以在轿车门锁检测中常见的问题为例阐明。
4.1 在深色的布景下检测黑色的物体
视觉检测本质上是像素色度的检测。被检测物的色度与周围布景的色度越附近, 检测越困难。为此, 能够考虑对被检测物独自运用一个镜头, 然后增强光照,以便取得满足的灰度。然后考虑运用Cognex 视觉剖析东西中的CogPMAlignTool 东西进行剖析。这是一个在可设定区域内寻觅类似物体的东西。首要找出被检测物上具有显着特征, 且与其周围布景色差较大的部分,将其设定为被检测物后,再圈定包括被检测物的可寻觅区域。设定类似度后, 取下被检测物, 对该工件进行检测,得到被检测物不存在时的类似度检测值。根据物体存在时的类似度值与物体不存在时的检测类似度值的差值从头设定门槛值。
4.2 检测绷簧等外表色泽易变的物体
绷簧类物体的特征是外表色泽易受润滑脂散布,歪斜视点等要素影响, 从而构成与人眼调查到的色泽差异较大的图画。对此,能够考虑运用Cognex 视觉剖析东西中的CogPMAl ignTool 东西对图画进行剖析。
设置办法同上。由于类似度不只仅反映在色度上, 也反映在形状上, 因而运用这一东西可较好的辨认该类被检测物。
4.3 较小的检测点检测
小的检测点往往形状不行杰出,所对应的像素较少,用类似度东西查找时,因特征像素过少,简略误判别。因而,可选用Cognex 视觉剖析东西中的CogBlobTool 东西进行剖析。这是一个经过设定色度的差异值来寻觅特定区域被检物体是否存在的东西。将Segmentation 中的mode 选为Hard Threshold(Fixed),将Polarity 选为LightBlobs,Dark background 或Dark Blobs,Light background,然后设定检测区域,点击动态运转按钮,调整Thr eshold的值, 调查右侧视窗中被检物检出状况的改动。取下被检测物, 对该工件进行检测, 得到被检测物不存在时的Blob 检测值。根据物体存在时的Blob 值与物体不存在时的检测Blob 值的差值从头调整Blob 设定值。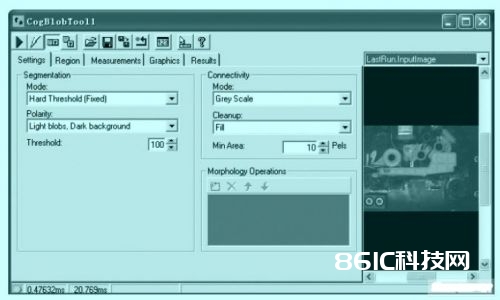
图5 CogBlobTool 东西设定界面
4.4 有油污的铆点检测
由于工况的不同, 某些铆点的外表会有必定程度的油污。这就使视觉检测极易遭到搅扰。可选用Cognex视觉剖析东西中的CogFindCircleTool 东西进行剖析。
这是一个在选定区域内寻觅圆并对圆进行丈量的东西。
在Caliper Settings 选项中,Edge Polarity 选项应钩选Any Polar i ty,由于Dark to Light 和Light to Dark选项因受油污的搅扰误判率较高, 而An y Pola r i ty 则是以设定的圆弧线为基准,辅以色差的判别,因而, 精确率很高。别的,Search Direction 选项中,Inward 和Outward的钩选应以实测效果为准。假如铆钉为规矩的圆柱形,则可钩选Inward,由于未铆接的铆钉往往没有油污, 半径较小;而铆钉为星形时则应钩选Outward,这样才可精确断定铆钉的铆接后半径值。需求留意的是,Caliper 选项中的Number of Calipers 应根据圆的巨细恰当选得大一些, 这样圆的判别根据点较充沛, 得到的圆也更精确。
4.5 存在规模可变的物体的检测
某些被检物的方位不是固定的,而是在某一区域内随机存在, 这就意味着有必要挑选适宜的搜索区域。为此, 能够考虑运用Cognex 视觉剖析东西中的CogPMAlignTool东西进行剖析。该东西供给了较为多样的边框划线东西,使得边框的设置十分人性化。
4.6 孔的检测
黑色物体上通孔的检测常常由于色差过于挨近而失利。可是, 假如在检测夹具上添加一个亮色的观测物, 使其穿过通孔, 再选用Cog n e x 视觉剖析东西中的CogBlobTool 东西进行剖析,问题即可处理。
4.7 固定区域高亮或高暗的判别
用判别某一区域亮或暗的办法来区别物体有无是常见的处理办法,选用Cognex 视觉剖析东西中的CogBlobTool东西进行设置, 可到达这一要求。别的, 设备在规划时应充沛考虑产品的工艺问题,某些检测物的外表能够经过产品工艺的改动而改动,这也为处理问题供给了新的思路。
5 结束语
视觉体系在不触摸物体的状况下, 能够快速精确地检测出物体的有无, 尤其是检测点数量比较多, 散布较为会集; 随类型的不同, 同一方位被检测物的品种较多, 形状较为杂乱的状况下, 视觉检测的优势较为杰出。当然, 视觉体系的运用也遭到本钱, 被检物的反光率等要素的限制而遭到限制。因而, 灵敏, 合理的调试视觉体系, 使其发挥最大的效果, 仍有待于业界人士的共同努力。






