跟着计算机、网络、机械电子、信息、智能移动机器人是一类能够经过移动机器人技能研讨归纳了多学科范畴的常识,关键技能可分为:途径规划、导航定位、途径盯梢与运动操控技能。途径规划又可分为大局和部分途径规划。大局途径规划是依据移动机器人全体使命进行途径规划,将全体途径使命分化,并树立大局地势数据库;部分途径规划是依据大局规划分化的子使命,结合移动机器人当时状况信息,实时规划可行途径;导航定位技能确认移动机器人在大局地图中的方位,并实时得到机器人与途径盯梢的相对方位联系,其关键技能是多传感器信息处理与数据交融技能。途径盯梢与运动操控技能的使命是操控移动机器人盯梢部分规划给出的途径,结合导航定位体系得到机器人自身状况信息与路途信息,完结航向和速度操控。移动机器人的途径规划、导航操控以及途径盯梢与运动操控技能是彼此相关的,任何一个体系的不完善都会导致全体功能的下降。
本文经过对移动机器人的研讨,完结了依据渡越时刻法的超声波测距模块规划,为机器人供给简略便利的障碍物间隔检测。本文首要完结对主控板操控器软件规划、电机驱动操控器软件规划和超声波测距软件的规划,使开发体系能够服务于移动机器人研讨的通用开发渠道。
移动机器人技能研讨归纳了多学科范畴的常识,关键技能可分为:途径规划、导航定位、途径盯梢与运动操控技能。途径规划又可分为大局和部分途径规划。大局途径规划是依据移动机器人全体使命进行途径规划,将全体途径使命分化,并树立大局地势数据库;部分途径规划是依据大局规划分化的子使命,结合移动机器人当时状况信息,实时规划可行途径;导航定位技能确认移动机器人在大局地图中的方位,并实时得到机器人与途径盯梢的相对方位联系,其关键技能是多传感器信息处理与数据交融技能。途径盯梢与运动操控技能的使命是操控移动机器人盯梢部分规划给出的途径,结合导航定位体系得到机器人自身状况信息与路途信息,完结航向和速度操控。
1主控板软件规划
主控板硬件完结模块办理、设备通讯及机器人定位脉冲检测等内容。在实践使用中,主控板硬件还担任超声波测距的软件办理。
主控板硬件中只要主控板操控器需求进行软件规划。主控板操控器TMS320LF2407A的首要使命是超声波测距的软件规划办理和其他一些根本设置内容,包含电机码盘的正交编码脉冲检测。初始选定TMS320LF2407A作为主控板操控器是考虑到此操控体系能够作为今后机器人使用的渠道,能够在TMS320LF2407A里嵌入实时体系,提高体系功能,便利接口开发。
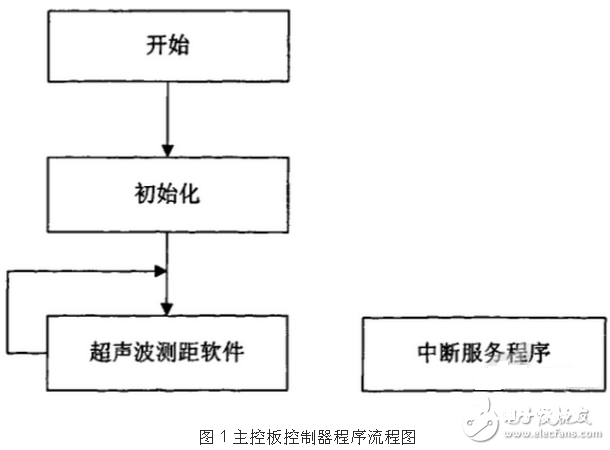
主控板操控器的软件规划内容包含模块初始化、串口通讯、正交编码脉冲检测和超声波测距软件。这儿介绍模块初始化串口通讯和正交编码脉冲检测等内容。图1主控板操控器程序流程图。