
基于AVR单片机实现超声波测距的程序编写-#include
#defineucharunsignedchar
#defineuintunsignedint
ucharint_flag;
uintqian,bai,shi,ge;
uinti;
floatdistance;
//AlphanumericLCDModulefunctions
#asm


STM32F103 开发板试用体验:超声波测距功能的实现-在日常生活中离不开对距离的测量,就测量的手段来讲主要有两种测量方式,一种是直接测量法,另一种则为间接测量法。基于超声波的测量方式就属于间接测量方式,它是通过计算超声波发送与接收发射超声波的时间,进而由时间和超声波传播的速度乘积来得到距离值。 由于该测量方式是非接触式的,故不但能测量两个实体间的距离,还能测量距液体表面的距离等,所以它的应用面很宽,例如用在车载组合仪表上可以测量车体距前后方物体的距离及水
MSP430单片机倒车雷达系统的设计-系统采用超声波测距原理。超声波测距仪器一般由发射器、接收器和信号处理器三部分组成。工作时,超声波发射器发出超声波脉冲,超声波接收器接收遇到障碍物反射回来的反射波,准确测量超声波从发射到遇到障碍物反射返回的时间,根据超声波的传播速度,可以计算出障碍物距离。

STC89C51单片机对超声波测距学习板的控制原理解析-超声波发生器内部结构有两个压电晶片和一个共振板。当它的两极外加脉冲信号,其频率等于压电晶片的固有振荡频时,压电晶片将会发生共振,并带动共振板振动,便产生超声波。
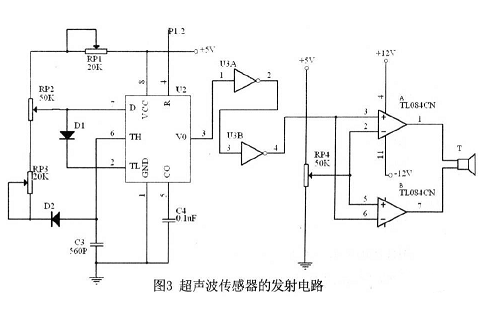
基于AT89S52单片机的超声波信号发射与接收电路设计-本设计的整体框图如图所示,主要由超声波发射,超声波接收与信号转换,按键显示电路与温度传感器电路组成。超声波测距是通过不断检测超声波发射后遇到障碍物所反射的回波,从而测出发射和接收回波的时间差T,然后求出距离S=CT/2,式中的C 为超声波波速。在常温下,空气中的声速约为340m/s。由于超声波也是一种声波,其传播速度C与温度有关,在使用时,如果温度变化不大,则可认为声速是基本不变的。

C8051单片机实现多目标超声波测距的设计-超声波测距传感器以其测量精度高、响应快和价格低廉而广泛应用在工业现场测距、移动机器人导航和定位等场合。超声波测距传感器常用的方式是1 个发射头对应1 个接收头,也有多个发射头对应1 个接收头。 它们共同之处是:每个接收头只测量一个位置,这个位置就是除盲区内因发射的超声波旁瓣引起的接收信号超声波包络峰值外,第1个接收信号超声波包络峰值对应的距离。
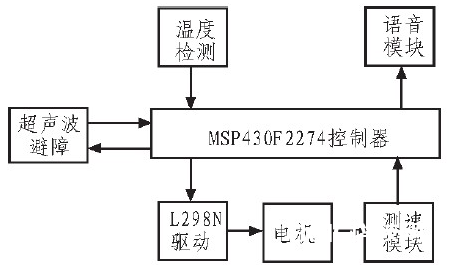
基于MSP430单片机对智能小车的控制设计-该系统主要由MSP430控制器,超声波避障模块,电机驱动,测速,语音模块,温度模块,小车的机械运动部分采用四轮差速转向式结构,前2个轮是驱动轮,分别由电机控制其运动,后两轮为随动轮。采用MSP430F2274单片机作为主控制单元,小车装有超声波模块来负责探测障碍物,做出避障决策。在小车的驱动轮上装有光电编码器对小车进行测速。为消除温度对测距的影响,使用温度传感器模块时刻检测小车周围的温度情况并修正。