电荷耦合器材(CCD)现在广泛运用于地理图画。
传统的CCD读出较慢且在高帧率的状况下有很高的读出噪音,这约束了它在高时刻分辨率地理学的运用。
21世纪初,英国的E2V 公司和美国TI公司各自独登时研发了一种具有新式读出结构的CCD 器材,即电子倍增CCD(Electron Multiplying Charge Coupled Device),简记为EMCCD.这是新一代高质量微光成像器材。与传统的CCD比较,它选用了片上电子增益技能,运用片上增益存放器使图画信息在电子搬运进程中得到扩大,这使得它在很高的读出速率下仍具有相对很低的读出噪声,能在微光源下高分辨率成像。
EMCCD 的这些特性,使得它能对微弱光信号进行快速的成像。近年来EMCCD被越来越多地运用到了地理观测,国外研究人员选用E2V 公司的EMCCD 器材L3 VISION CCD规划的相机取得了极好的观测作用,并进行了光子技能成像试验。而国内对地理用EMCCD相机的研发与运用还处于起步阶段。现在,试验室正在研发一套依据EMCCD的二维地理光子计数试验成像体系,该成像体系可运用TI公司的EMCCD 器材TC253和TC285作为图画传感器。
本文针对运用TC253器材构成的图画搜集体系,首要介绍EMCCD的数字操控计划和规划办法。因为硬件体系运用Altera公司EP3C16Q240C8N FPGA芯片,所以该数字体系是在Altera Quartus Ⅱ 8.0开发环境下选用VHDL言语来进行规划并完成整个体系的数字操控部分。本文论述了该数字操控体系的规划思维以及VHDL 的完成进程,给出了要害信号的仿真与实测波形,并对成果进行了剖析。
1 EMCCD图画传感器与模仿信号处理器的
操控要求
TC253 是一款具有680(H)×500(V)像素的帧搬运CCD图画传感器,其结构图如图1所示。它被广泛的运用于要求高灵敏度、低噪声而且小尺度的特别用处的成像体系之中。该图画传感器的像素尺度为7.4 μm×7.4 μm,具有快速单脉冲铲除才能,以及逐行扫描、隔行扫描、行兼并三种读出形式。在本体系规划中,运用的是逐行扫描形式。
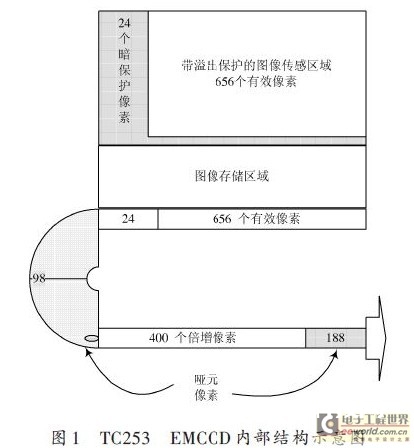
TC253 归于帧搬运结构的EMCCD 器材,其面阵分为图画传感区(亦称成像区)和存储区两部分,如图1所示。上电作业时,光学印象照射到图画传感区的像素上,对应像素的势阱会发生并搜集电子,构成一幅电子印象。在曝光完毕今后,这幅电子印象在成像区和存储区的笔直时钟驱动下快速搬运到图画存储区域。尔后该电子印象在存储区的笔直搬运时钟的驱动下,逐行地搬运到水平存放器中,并在水平搬运时钟的驱动下,经过水平串行存放器搬运到输出扩大器。TC253 的水平串行存放器分为前后两部分,前一部分与其他CCD 图画传感器的规划相同;后一部分则是共同的,包括400个级联的电子倍增存放器,在这些倍增存放器前后还有一些过渡的哑元像素,详细级数与方位如图1 所示。
这400个级联的倍增存放器是该器材最具特征的部分,依据所施加的倍增电极电平凹凸和作业温度,可以进行电子印象的扩大。要使EMCCD可以精确无误的读出光电图画,需使光电子能有序地进行笔直与水平的替换搬运,并经过扩大与相关双取样(CDS)电路进行模仿信号处理,最终经模/数转换器(ADC)输出。因而,有必要依照EMCCD 以及CDS 和ADC 的数据手册所述的驱动时序来进行相关时钟的时序规划。EMCCD TC253 一共有4 个时钟驱动信号,4 个笔直搬运信号(IAG1,IAG2,SAG1,SAG2),3 个水平搬运信号(SRG1,SRG2,CMG),一个曝光溢出操控信号(ODB)。在本体系中,为简化CCD模仿信号处理电路的规划,运用了单片模仿信号处理器AD9845B 作为CCD 输出模仿信号的扩大、CDS 和ADC电路。
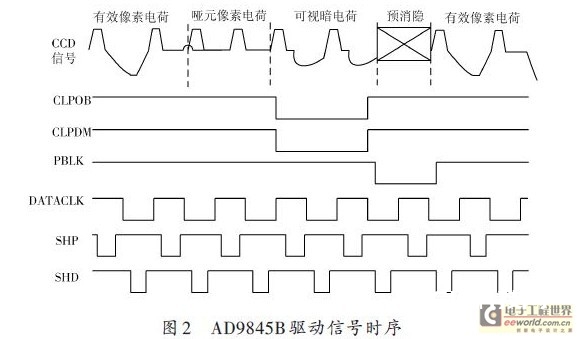
模仿信号处理器AD9845B是一款针对CCD运用的处理器AD9845A 的升级版,亦称为模仿前端处理器(AFE)。它具有30 MHz单通道结构,用于面阵CCD 隔行扫描和逐行扫描信号的调度和采样[8].依据其与CCD对应的时序联系,共需求设置6个时钟驱动信号,别离是相关双采样搜集参阅电平的时钟SHP、相关双采样搜集数据信号电平的时钟SHD、读出数据时钟DATACLK、黑电平箝位时钟CLPOB、输入箝位时钟CLPDM 以及消隐数据时钟PBLK[9].6个驱动信号依照图2所示的时序进行设置,这与AD9845B 数据手册所供给的时序稍有不同。
2 数字体系总体规划思维
由EMCCD 和ADC 的数据手册并结合该项意图要求可知,该数字操控体系便是要完成EMCCD图画传感器在帧搬运读出形式和ODB清零形式下的驱动时钟信号,以及在帧搬运读出形式下,驱动ADC正常作业的时钟信号。帧搬运读出形式有4种水平读出频率,别离为12.5 MHz,6.25 MHz,3.125 MHz,1.562 5 MHz,规范读出频率为12.5 MHz,别的三种读出频率,为了比照测验图画搜集的作用而设置的。一起要求可以操控曝光积分时刻,挑选是否逾越读出(Overscan)。依据VHDL言语的特色,选用顶层模块操控底层模块的方法,即以顶层逻辑操控各个底层逻辑的方法来完成该数字操控体系的功用。这种规划思维在试验室规划的RDCCD 相机[10]、KAISS 相机[11] 中都运用过,操控作用杰出,程序结构明晰。
在顶层模块中,界说了一些与底层模块衔接的端口,以及数字操控体系与外部硬件衔接的端口,设置了顶层模块与各底层模块端口匹配的方法。生成了各个模块需求的各种时钟信号。以及协调了帧搬运读出形式与ODB清零形式的切换。
在底层模块中首要是两个子模块:ODB 清零和帧搬运读出。每个子模块都有其独立的输入时钟信号与输出端口,在相应模块被选中履行时能顺利完成各自使命,生成正确的输出时钟信号。
3 数字体系的完成与仿真
该规划是在Altera Quartus Ⅱ 8.0的开发环境下,别离对顶层模块和底层模块进行VHDL编程规划与仿真的。下面将介绍各模块的详细规划、仿真进程和一些完成技巧。
3.1 顶层模块的规划
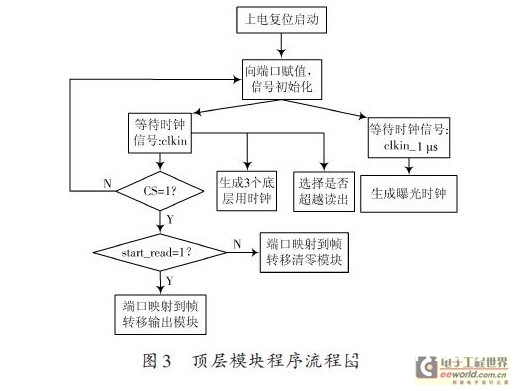
顶层模块中界说了一些输入端口、输出端口和一些与底层模块衔接用端口及其映射联系,生成了底层模块需求的各种时钟信号,设置了各模块的切换条件。以clkin作为输入主时钟,生成了3个底层用时钟:清零时钟clock_C,笔直搬运时钟clock_V、水平搬运时钟clock_H;以clkin_1 μs作为另一输入时钟,生成曝光阶段时钟clock_1 μs.还设置了“cs”,“read_select”,“start_read”三个判别信号,用于挑选、切换ODB清零与帧搬运读出形式。在Quartus Ⅱ中编译成功后生成顶层模块,命名为top.顶层模块的VHDL 程序流程图如图3所示。
3.2 底层模块的规划
底层模块包括ODB清零子模块与帧搬运读出子模块,有时亦称为ODB 清零作业形式与帧搬运读出作业形式。下面别离介绍这两个子模块的详细规划进程与仿真成果。
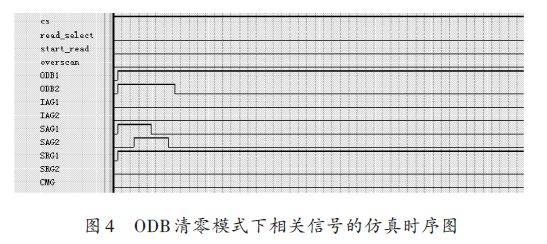
3.2.1 ODB清零形式由顶层模块流程图(即图3)可知,当片选信号cs=’1′,而且read_select=’0‘时,体系将运转ODB 清零模块。该模块便是在体系上电后或CCD未进入曝光作业状况时对CCD 成像区的剩余电荷进行铲除。依据TC253的数据手册,曝光溢出操控信号ODB在整个图画搜集进程中有三个电平值,溢流操控阶段为5.3 V,清零阶段为12.5 V,电荷搬运阶段为4.8 V.因而在详细的VHDL编程进程中,可以生成ODB1,ODB2两个信号,将它们输出到一个ODB 驱动电路中,可构成ODB 操控信号。
该模块以顶层生成的时钟信号clock_C作为参阅时钟,当清零使能信号start_read=’0’时,开端ODB清零进程。在此进程中,笔直搬运信号SAG1、SAG2运转一个周期。图4 为该子模块VHDL 程序的仿真成果。经过比照TC253的数据手册可知,仿真波形与该器材要求的时序是共同的。
3.2.2 帧搬运读出形式
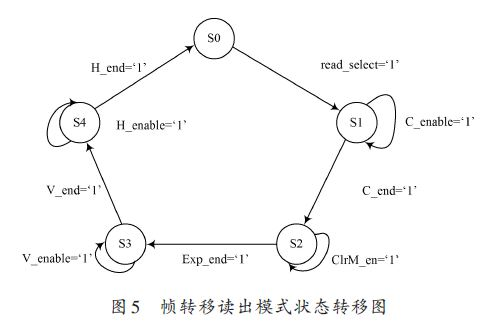
依据TC253 的数据手册,将该EMCCD 器材的成像与帧搬运读出形式划分为4个阶段,按次序别离是清零阶段S1、曝光阶段S2、笔直搬运阶段S3、水平输出阶段S4.在顶层生成的4个时钟信号,别离用作这4阶段的操控时钟,使之可以精确地构成并输出满意TC253所需的各信号。
为了能使4 个阶段的信号次序履行、互不抵触,在VHDL 程序代码中,需求设置必要的断定信号,以操控状况的搬运。这4个阶段的状况搬运图如图5所示。由图可知,体系上电后进入初始状况S0,当read_select=’1‘时,进入帧搬运读出形式。当使能信号C_enable=’1’时,进行成像区电荷铲除S1,直到完毕标志位C_end=’1‘后进入曝光阶段S2;当曝光使能位ClrM_en=’1’时,开端曝光,直到完毕标志位Exp_end=’1‘后进入笔直搬运阶段S3;当笔直搬运使能位V_enable=’1’时,开端笔直搬运,直到完毕标志位V_end=’1‘后进入水平输出阶段S4;当水平输出使能位H_enable=’1’时,开端水平输出,直到完毕标志位H_end=’1‘后回到初始状况S0.
为了能正确输出数字图画,在水平输出阶段,还需求对模仿信号处理器AD9845B 进行操控。为此,在此阶段(S4),需求依据AD9845B 的时序要求(见图2),发生并输出该器材要求的DATACLK,SHP,SHD,PBLK,CLPDM,CLPOB信号波形。
图6 为帧搬运形式下首要信号的仿真成果。按TC253 实践的帧搬运转数680 和水平存放器数目500,仿真波形将很长,无法显现。因为仿真的意图是验证逻辑和时序联系,因而,在仿真时咱们将帧搬运转数和水平存放器数目别离设定为10 和10,才获