0 导言
数学模型是整流器操控算法仿真的根底,依据不同的操控需求能够树立不同的数学模型。本文除了研讨整流器数学模型之外,还介绍了依据不同坐标系数学模型的坐标改换、单位功率因数的界说、PWM 整流器四象限运转原理等与整流器操控算法仿真相关的一般性的问题。。
1 三相电压型整流器数学模型
1.1 三相电压型整流器一般数学模型
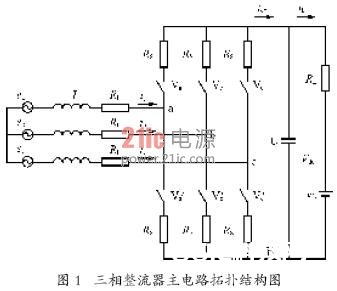
所谓三相电压型整流器一般数学模型便是依据三相电压型整流器拓扑结构,在三相停止坐标系(a,b,c)中,使用电路基本规律(基尔霍夫电压、电流规律)对三相电压型整流器所树立的一般数学描绘。三相电压型整流器拓扑结构如图1所示。
该数学模型在以下假定条件下树立:
1)电网电动势为三相平稳的纯正弦波电动势(ea,eb,ec);
2)网侧滤波电感L 是线性的,且不考虑其饱满情况;
3)功率开关管损耗以电阻Rs表明,即实践的功率开关管能够用抱负开关与损耗电阻Rs 串联等效来表明;
4)为描绘整流器能量的双向传输,整流器直流侧负载由电阻RL和直流电动势eL串联表明。
依据三相电压型整流器特性剖析需求,其一般数学模型的树立可选用以下两种方式:
1)选用开关函数描绘的一般数学模型;
2)选用占空比描绘的一般数学模型。
选用开关函数描绘的一般数学模型是对整流器开关进程的准确描绘,较适合于整流器的波形仿真,因此本文所述的整流器体系仿真是选用开关函数描绘的数学模型。下面以三相整流器拓扑结构为例,树立选用开关函数描绘的一般数学模型。
为剖析便利,首要界说单极性二值逻辑开关函数sk为

将整流器的功率开关管损耗等效电阻Rs 同沟通滤波电感等效电阻RI兼并,且令R=Rs+RI,选用基尔霍夫电压规律树立三相整流器的a相回路方程为


1.2 三相电压型整流器d-q 模型
三相停止对称坐标系下的一般数学模型具有物理含义明晰、直观等特色。可是这种数学模型中,整流器沟通侧均为时变沟通量,因此不利于操控体系的规划。为此,能够经过坐标改换将三相对称停止坐标系(a,b,c)转换成以电网基波频率同步旋转的(d,q)坐标系。这样,经坐标旋转改换后,三相对称停止坐标系中的基波正弦沟通变量将转化成同步旋转坐标系中的直流变量,然后简化了对操控体系的规划。
三相整流器一般数学模型经同步旋转坐标改换后,即转换成三相整流器d-q 模型。
要完成从三相停止坐标系(a,b,c)到两相同步旋转坐标系(d,q)的改换,有必要首要确认坐标系(d,q)的空间方位。如图2 所示,在三相停止坐标系(a,b,c)中,E、I 别离表明三相电网电动势矢量和电流矢量,而且E、I 以电网基波角频率棕逆时针旋转。依据瞬时无功功率理论,在描绘三相电量时,为简化剖析,将两相旋转坐标系(d,q)中q 轴与电网电动势矢量E同轴。即q 轴按矢量E定向,矢量E(q 轴)方向的电流重量iq界说为有功电流,而比矢量E 滞后90毅相角的轴(d轴)方向电流重量id界说为无功电流。别的,初始条件下,令q 轴与a轴重合。

1.3 坐标改换在Matlab/Simulink中的完成
从三相停止坐标系(a,b,c)到两相同步旋转坐标系(d,q)的改换是算法仿真中重要的模块之一。滑模变结构电流操控算法自身便是依据两相同步旋转
坐标系的;滞环SVPWM 算法虽然是依据三相停止坐标系的,可是在对电流操控作用的剖析中也用到了坐标改换模块。在此将该模块功用的完成办法做简略介绍。
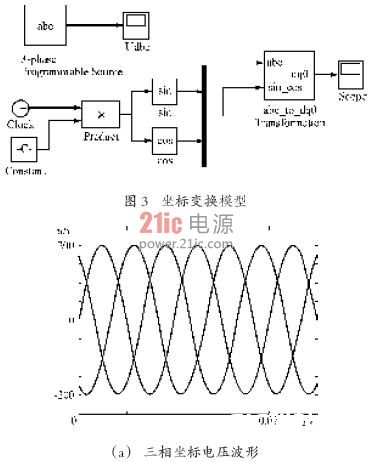
三相停止坐标系到两相恣意旋转坐标系的改换及其反改换现已树立在Smulink 的power system 模型库中,提取途径为power system blockset / extra library / measurements / abc_to_dq0 transformation(dq0_abc transformation)。使用该模块完成坐标改换的比如如图3所示。仿真成果如图4所示,其间图4(a)为改换前的三相电压,图4(b)为经坐标改换后旋转两相坐标系上的电压波形,因为所选角频率棕与电源角频率同步,所以在两相同步旋转坐标系上的电压现已是直流。