摘要:选定了机动渠道单腿自在度数,设定了关节的活动规模。在此根底上,运用单腿运动学剖析的成果,研讨了大腿和小腿长度份额不一起足端作业空间的改动,确认了两者最优的份额关系。最终根据三次B样条曲线进行了摇摆腿足端轨道的规划。
足式移动方法依托与地上之间离散的接触点完成了在杂乱地势中的杰出运动功用和动力功用。与轮式或许履带式移动方法比较,足式运动习惯杂乱地势的才能更强,这也是大型动物多为四足哺乳动物的原因。仿照四足哺乳动物而研发的四足步行机动渠道在杂乱环境中具有巨大的运用潜力,其已成为各国学者研讨的热门。四足步行机动渠道腿部的结构规划是机动渠道规划过程中的中心作业之一,国内外学者对机动渠道单腿结构规划进行了充沛的注重。
较早的步行机动渠道腿部结构多为仿照爬虫类的腿部结构,如日本的TITAN系列四足步行机动渠道。但这些步行机动渠道运动速度慢,能完成的步态少,单腿机械结构是其受到约束的根本原因。自从Bigdog四足步行机动渠道发布以来,腿部结构仿哺乳动物的步行机动渠道不断引起人们的注重。作为高功用四足步行机动渠道的典型代表,Bigdog四足步行机动渠道单腿分为四个部分,装备四个自动自在度,足端装有减小腿与地上冲击的被迫自在度。Bigdog之后的重型运载渠道–LS3四足步行机动渠道单腿有三个自动自在度,关节运动十分灵敏,全体选用自动和婉操控,取消了足端绷簧。Bigdog系列的最新产品 Spot四足步行机动渠道单腿也有三个自动自在度,各部分和谐运作的才能更强,关节的活动愈加自若,十分合适在人类的生活环境中运用。
从Bigdog系列四足步行机动渠道的开展能够看出,单腿的结构对机动渠道的各项功用有重要影响,从而决议了机动渠道的运用领域。单腿的结构规划首要包含了单腿的自在度设置、各驱动关节的活动规模设定、各腿段的长度份额以及足端轨道曲线等。
1 单腿的自在度设置和各关节的转角规模
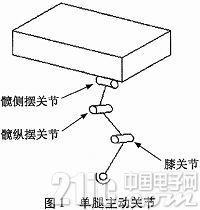
经过对四足哺乳动物腿部骨骼结构的研讨发现,动物腿部一般由5个首要的部分组成,各部分之间由关节衔接,单腿有5个自动自在度。动物腿部的特别结构和冗余自在度使其运动灵敏,习惯杂乱地势的才能十分强。步行机动渠道是仿照四足动物规划的,可是因为技术水平的约束,单腿还无法抵达自动自在度大于4。因而为了减小操控的难度,下降机械结构的杂乱程度,规划的机动渠道单腿有3个自动自在度,分别是:髋侧摆段关节、髋纵摆关节和膝关节,如图1所示。
步行机动渠道的机体在腿部的推进下不断行进,腿部驱动关节转角规模的巨细代表了机动渠道足端点能抵达的规模。关节转角规模越大,机动渠道单腿活动规模越大,机动渠道运动和抗侧向搅扰的才能也就越强。但关节活动规模越大也增加了各关节段干与的危险。经过对四足动物关节转角规模的丈量来处理这个问题。 Jaegger等较精确地丈量了德国牧羊犬各关节(除了髋侧摆关节)转角的改动,如图2所示。
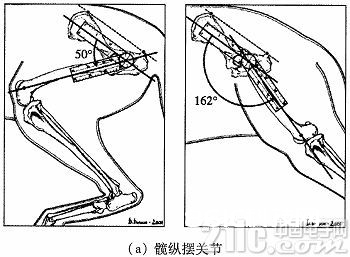
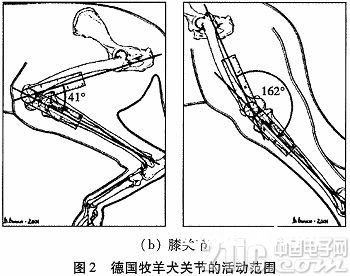
由上图能够得德国牧羊犬各关节角的活动规模,如表1中所示。

由表1中数据能够得到牧羊犬关节的活动规模基本上在110°左右。在步行机动渠道规划过程中,考虑到机械体系的功用还无法抵达动物骨骼肌肉体系的功用,而且当各驱动关节选用相同类型的液压缸时,机动渠道全体的杂乱程度大大减小,因而对表中各关节转角的改动规模进行了批改,运用批改后的关节活动规模作为机动渠道关节的活动规模。
2 单腿运动学剖析
步行机动渠道单腿的运动学剖析是机动渠道动力学求解和足端曲线合理规划等后续作业的根底。本文用D—H坐标法对机动渠道的单腿进行运动学剖析(以右前腿为例)。
首要树立各腿段的D—H坐标系,如图3中所示。B1-x0y0z0为右前腿坐标系,H1-x1y1z1为髋关节纵摆关节坐标系,K1x2y2z2为髋纵摆关节坐标系,A1-x3y3z3为膝关节坐标系,F1-x4y4z4为足端坐标系。

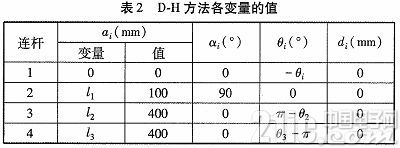
由D-H坐标系的界说和各杆件的尺度参数,能够得到D—H法各变量的值,如表2中所示。αi为沿xi轴方向从zi-1轴和xi轴的交点到第i坐标系原点的间隔;αi为按右手规则,绕xi轴由zi-1轴转向zi轴转过的视点;di为沿zi-1轴方向从第i-1坐标系的原点到zi-1轴和xi轴的交点的间隔;θi为按右手规则,绕zi-1轴由xi-1轴转向xi轴转过的视点。
所以,从右前腿坐标系到足端坐标系的各旋转改换矩阵为:

由正运动学剖析,得到了足端点在单腿坐标系中的坐标和姿势。下面运用正运动学剖析的成果,对各关节段的份额关系进行研讨。
3 各腿段的长度份额研讨
3.1 机器人足端作业空间剖析
步行机动渠道的足端点作业空间是其摇摆腿结尾参考点所能抵达的空间点的规模。这个规模代表了机动渠道摇摆腿所能抵达的方位,是机动渠道结构优化规划需求考虑的重要方面。足端作业空间的求解方法有解析法、图解法或数值法等多种。运用正运动学剖析的成果,在Matlab中求解得到各自动关节视点改动时足端点的作业空间云图,然后运用图画处理方法进行足端作业空间面积的求解。求解的过程为:
1)在各关节的改动规模内,使关节顺次发生必定的转角,得到了关节角变量的组合。
2)将关节角变量带入正运动学解中,得到一组足端点的坐标值,并作出其曲线图,很多的曲线图组合构成云图。
3)依照Matlab中图画处理的方法,得到足端空间的面积。
3.2 各腿段的长度份额研讨
因为步行机动渠道首要是在前后方向运动,侧向运动往往用于确保机动渠道本身的稳定性,使机动渠道习惯杂乱地势的才能更强,而两个纵摆关节段是机体前后方向运动依托的杆件,因而仅对两个纵摆关节段的长度份额进行研讨。为使研讨简洁一起也有代表性,假定髋关节纵摆段和小腿段的总长为1 m,两腿段的长度顺次取遍0.1~0.9 m,步长为0.1 m,且L1为髋关节纵摆段长度标识,L2为小腿段的长度标识。当L1与L2取不同的份额时,运用Matlab作出其作业空间的云图并核算面积巨细,如表2 中所示。

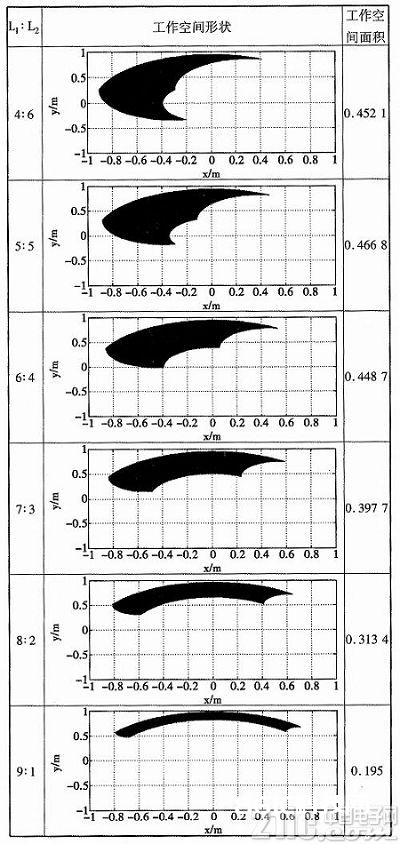
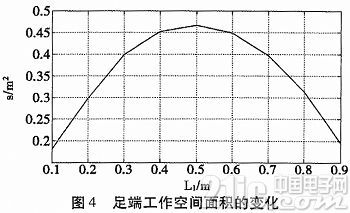
由表2能够得到,跟着L1与L2比值的增大,步行机动渠道足端作业空间巨细改动明显,足端点可达规模先增大后减小,所以存在使足端作业空间最大的最优份额。为便利比较,作出足端作业空间面积巨细与髋纵摆段长度L1的曲线图。由图4可更直观的得到当L1与L2持平时,足端作业空间面积最大。
4 足端轨道规划
步行机动渠道足端轨道规划是机动渠道单腿规划很重要的一个方面。足端轨道规划一般是规划步行机动渠道足端点相对地上坐标系的运动规则。因为髋侧摆关节在机动渠道正常行走过程中一般不发挥作用,所以在机动渠道单腿平面内进行足端轨道规划。步行机动渠道经过迈腿完成其越障和行进功用,腿部足端轨道规划首要是摇摆腿足端的轨道规划。摇摆腿足端轨道规划的好坏直接决议了机动渠道的越障才能和运动才能。常用的足端轨道有抛物线、直线段、摆线等。本文选用三次B样条曲线进行机动渠道的足端轨道规划。
4.1 三次B样条曲线的概念
关于给定的m+n+1空间极点pi(i=0,1,…,m+n),第k(K=0,1,2…n)段n次B样条曲线界说为:

三次均匀B样条曲线作为一种自在曲线,它本身有许多杰出的特色,使它合适作为步行机动渠道越障时足端轨道曲线。首要,三次均匀B样条曲线与空间极点的肯定方位没有关系,只与它们的相对方位有关。其次,三次均匀B样条曲线有凸包性和保凸性。经过选取恰当的空间极点,能够使结构的足端轨道曲线不会发生奇特点。然后,三次均匀B样条曲线具有部分修改性。改动单个的空间极点,只会影响与这个极点有关的结构曲线,不会对全体发生影响。
4.2 足端轨道的规划
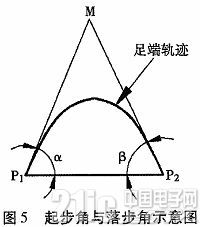
在平整地上上四足步行机动渠道的足端轨道曲线一般有两个参数来描绘,一个是步长s,一个是步高h。步长s和步高h能够较好地反映足端轨道曲线的运动特性。一般步高h与步长s的比值越大,阐明四足步行机动渠道的跨过妨碍的才能越强,但运动速度较慢。步高h与步长s的比值越小,阐明四足步行机动渠道行进特性较好,但跨过妨碍的才能较差。而关于三次B样条曲线,在步长必定的情况下,步高由起步角和落步角决议,因而引进起步角α、落步角β和步长S来描绘三次B样条曲线。如图5所示,图中α为起步角,β为落步角,p1点为起步点,p2为落步点,M点为起脚方向与落脚方向的交点。
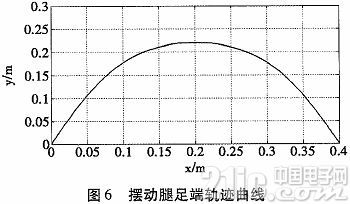
在此步长S设置为400 mm,起步角和落步角均为62.5度,最大步高为220 mm。所以,可得到摇摆腿的足端曲线如图6所示。
5 定论
1)对四足步行机动渠道单腿的自在度数进行了设定,在仿生学剖析的根底大将各驱动关节的转角规模设置为40°~140°;
2)对单腿进行了运动学剖析,而且在此根底上对髋纵摆关节段和大腿段长度份额不一起的足端作业空间进行了研讨,得出了当两者长度持平时足端作业空间最大的定论;
3)论述了三次B样条曲线的概念,并在此根底上对足端轨道曲线进行了规划。