各种间隔传感器的作业原理解析
各种间隔传感器的作业原理解析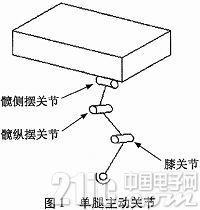
选定了机动平台单腿自由度数,设定了关节的活动范围。在此基础上,利用单腿运动学分析的结果,研究了大腿和小腿长度比例不同时足端工作空间的变化,确定了两者最优的比例关系。最后基于三次B样条曲线进行了摆动腿足

本文针对水下机器人(Remote Operated Vehicle)的功能和控制需求,建立了ROV运动学模型,设计了ROV闭环定向控制系统。基于PID控制方法,进行了Simulink数学仿真和模拟闭环


水下航行器操控性能指标中对定向性能有较高要求,而水下航行器的运动具有强的非线性和耦合性,使得不同航速下定向控制和定深转向综合控制成为难点。本文建立了水下航行器的运动学模型,基于滑模理论设计了航向控制器

本文结合多功能自动平衡护理床模型和组成特点,基于SolidWorks三维参数化设计流程,对其参数化设计、装配与运动仿真、工作空间分析及运动学分析等方面进行深入剖析。