


摘要: 在车牌字符辨认中,针对单一辨认办法辨认率不高的问题,提出了运用数据交融技能,将不同的辨认办法有机地结合起来构成交融型辨认体系,有用地、归纳地进步整个体系的辨认功用。数据层挑选了加权均匀算法,特征层挑选了人工神经网络算法,决议计划层选用了含糊推理算法完成对车牌字符的终究辨认。运用MATLAB 进行了仿真,并与独自运用BP 神经网络算法的辨认率进行了比较,成果证明选用数据交融技能体系的辨认率得到了较大进步,到达90%以上。
车牌辨认体系是图画模式辨认范畴的一个经典研讨课题。对车牌辨认技能的研讨不光会极大促进数字图画处理、核算机视觉、模式辨认与人工智能等相关范畴理论与实践的开展,并且其在公共安全、交通管理、军事部分等的实践运用价值也不可估量。一个典型的车牌辨认体系由图画收集、图画预处理、车牌定位、字符切割以及字符辨认几部分组成。其间字符辨认是车牌辨认体系中的关键环节,辨认办法的好坏直接影响到整个车牌终究的辨认作用。在字符辨认模块,针对单一辨认技能辨认率较低的问题提出了从数据交融理论的视点动身,有用地、归纳地运用多种辨认技能来进步体系的辨认率。
1 数据交融的基本原理
数据交融技能实践上是对人脑归纳处理杂乱问题的一种功用模仿。在多传感器 体系中因为各种传感器供给的信息具有不同的特征:时变的或许非时变的;实时的或许非实时的;快变的或许缓变的;含糊的或许确认的;准确的或许不完整的;牢靠的或许非牢靠的;彼此支持的或许互补的;也可能是彼此对立或抵触的。而数据交融体系能充分使用多个传感器资源、对各种传感器及其观测信息合理分配与运用,将各种传感器在空间或时刻上的互补或冗余信息根据某种优化原则组合起来,发生对观测环境的一致性解说和描绘。因而,数据交融的方针是根据各种传感器别离观测信息,再通过对信息的优化组合导出更多的有用信息,它的终究意图是使用多个传感器一起或联合操作的优势, 进步整个体系的有用性,消除单个或少数传感器的局限性。
体系中因为各种传感器供给的信息具有不同的特征:时变的或许非时变的;实时的或许非实时的;快变的或许缓变的;含糊的或许确认的;准确的或许不完整的;牢靠的或许非牢靠的;彼此支持的或许互补的;也可能是彼此对立或抵触的。而数据交融体系能充分使用多个传感器资源、对各种传感器及其观测信息合理分配与运用,将各种传感器在空间或时刻上的互补或冗余信息根据某种优化原则组合起来,发生对观测环境的一致性解说和描绘。因而,数据交融的方针是根据各种传感器别离观测信息,再通过对信息的优化组合导出更多的有用信息,它的终究意图是使用多个传感器一起或联合操作的优势, 进步整个体系的有用性,消除单个或少数传感器的局限性。
数据交融技能与经典信号处理办法有实质的差异,数据交融所处理的多传感器信息不光具有更为杂乱的方式,并且还可以在不同的信息层次上呈现, 这些信息表征层次包含:数据层、特征层和决议计划层。直接在收集到的原始数据层进步行的交融称为数据层交融, 数据层交融是最低层次的交融,它的长处在于能坚持尽可能多的现场数据,供给其他交融层次所不能供给的纤细信息, 但其局限性也是比较显着的,主要原因在于数据层交融是在信息的最底层进行的,因为传感器原始信息的不确认性、不完全性和不稳定性,对交融成果影响较大,稳定性较差。因而,数据层上的交融具有很大的盲目性,原则上不赞成直接在数据层进步行数据交融,并且数据层交融一般要求选用的传感器有必要是同类型传感器或相同量级的传感器。数据层上一般选用的交融办法有加权均匀法、像素灰度值挑选交融办法、根据区域特征的交融办法、小波变换法、金字塔分化办法等。特征层交融是先对来自传感器的原始信息进行特征提取,然后再对特征信息进行归纳剖析和处理,特征层交融归于中心层次的交融,也是最老练、开展最完善的交融理论,它的长处是通过特征提取既完成了信息压缩,又保留了最重要的信息。特征层交融一般选用的算法有参量模板法、聚类剖析法、人工神经网络等。决议计划层交融是一种高层次交融, 它能充分使用特征层交融的终究成果,选用恰当的交融技能给出终究的检测、操控、指挥、决议计划的根据,决议计划层交融的最大长处是具有容错性,当一个或几个传感器呈现错误时,通过恰当的交融,体系终究还能取得正确的成果。决议计划层交融一般所选用的办法有贝叶斯揣度、D-S根据理论、含糊集理论、专家体系等。总地说来,数据交融实质上是一个由底层至顶层,对多元信息进行交融,逐层笼统的信息处理进程。
2 根据数据交融理论的车牌字符辨认
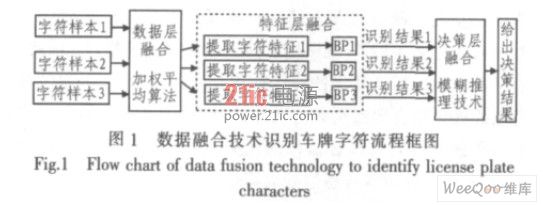
数据交融是一种对数据的归纳和处理技能,是许多传统学科和新技能的承继和运用,而对数据的归纳和处理才能反响在所选用的交融算法上。因而,在一个交融体系中,中心的问题是挑选适宜的交融算法。通过对各种交融算法原理及优缺点的研讨比较之后,终究确认了各层上所选用的交融算法: 数据层挑选了加权均匀算法; 特征层挑选了人工神经网络算法;决议计划层选用了含糊推理算法以完成对车牌字符的终究辨认。图1 为运用数据交融技能辨认车牌字符的流程框图。
2.1 数据层交融
加权均匀交融算法,是通过交融各源图画的冗余信息进步检测的牢靠性和交融后图画的信噪比。并且它对来自不同传感器的多幅源图画进行数据层交融时,无需考虑各源图画像素之间的相关性及配准技能,因而也是最简略、最便利的数据层交融算法。
以3 幅图画为例对加权均匀算法进行叙说:设交融成果为FUS(i,j),输入图画为A(i,j)、B(i,j)和C(i,j),(i,j)是图画中某点像素的坐标方位,该算法的表达式如式1 所示:
规划中对同一车辆收集了3 帧图画,通过定位、字符切割、归一化后,针对同一个车牌字符得到了3 个样本,对这3个样本的像素值进行均匀交融, 得到交融今后的字符样本,再将交融成果送往特征层进行下一步处理。与以往只用单帧图画作为辨认目标的辨认算法比较,数据交融技能弥补了因单帧图画拍照作用欠安而构成无法辨认的缺乏,这也是本规划的立异处之一。
2.2 特征层交融
神经网络具有很强的容错性和自学习、自组织及自适应才能, 可以模仿杂乱的非线性映射, 刚好满意多传感器信息交融技能处理的要求,在数据交融理论研讨中遭到高度重视,具有宽广的运用远景。别的,在数据交融体系中要将来自不同类型传感器的数据进行非线性相关并构成一个交融矢量是十分困难的, 而神经网络则能完成这一特别功用。因而, 神经网络分类器是本规划特征层交融首要考虑选用的算法。在许多的神经网络分类器中BP神经网络算法数学含义清晰、学习进程清楚, 并且网络经练习收敛之后进行辨认时还具有核算量小、速度快等优势。所以, 终究确认选用BP 神经网络分类器作为特征层的交融算法。
具有单隐层的3 层BP 网络可以迫临任何有限函数,也能使处理的问题简略化,并且车牌辨认体系归于一个小类别分类问题, 故选用3 层BP 神经网络结构符合实践运用的要求。首要对通过数据层交融后的字符像素进行特征提取,规划*提取了3 类互补性强的字符特征: 字符原始特征,粗网格特征及水平、笔直投影特征和字符外围概括特征,作为输入信号别离送给3 个BP 神经网络分类器, 根据辨认体系的需求设置好各个网络的初始参数后, 开端对3 个BP 网络进行练习,练习进程中不断调整网络参数,终究使各个BP 网络到达杰出的收敛作用, 然后用练习好的3 个BP 神经网络别离对同1 个车牌字符进行辨认。
2.3 决议计划层交融
决议计划层选用了含糊推理技能[6-7]作为终究判定的根据。含糊体系中,常识的抽取和表达比较便利,但学习才能较差,神经网络可从样本中进行有用的学习,但从网络中提取常识的进程比较困难;含糊体系适合于处理结构化的常识,而神经网络对处理非结构化信息更为有用。规划中挑选特征层神经网络分类器的输出作为决议计划层含糊推理体系的输入还可完成数据收拾、*和按捺噪声,使获取含糊规矩的进程变得简单。所以,交融体系中含糊推理技能和神经网络技能能克服本身缺乏、各取所长、优势互补,从而使交融体系的功用得到改进。






