


1 摘要
该项目要求依据FPGA完结车牌定位算法。本项目拟充沛开掘FPGA并行运算在图画处理范畴的优势,完结依据Adboost算法的车牌检测硬件架构,终究完结车牌定位信息的实时输出。
2 体系原理和技能特色
2.1 Adaboost车牌定位算法原理
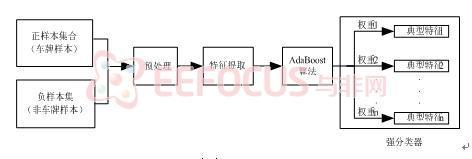
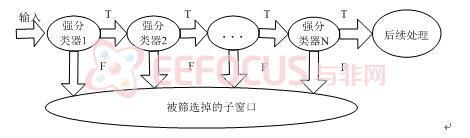
Adaboost车牌定位算法的规划,分为离线练习模块和在线辨认模块如图1所示,离线练习模块经过对很多正、负样本的学习,构成一系列的弱分类器(典型特征),然后依据权重把这些弱分类器组合成强分类器,如图2(a)所示。实践应用时,若干个强分类器构成如图2(b)所示的Cascade结构,Cascade结构就像一个筛孔可变的筛子,开端的筛孔很大,使得大多数车牌都能经过,在此基础上尽量扔掉反例,方位越靠后的筛孔越杂乱,即包含越多的弱分类器,因此也具有更强的分类才能。在线检测模块经过离线练习模块练习好的Cascade结构分类器,运用可以缩放的Haar特征,在待辨认图片上进行多标准的扫描,终究经过后续处理输出辨认成果(车牌方位信息)。在线检测算法流程如图3所示。首要检测当时窗口,若未经过分类器则跳出;若经过一切分类器则判定为车牌,然后检测下一窗口。扫描完当时图画今后,扩大检测窗口,从头扫描。
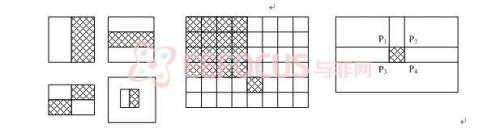
Adboost车牌定位算法依据Haar特征,Haar特征由一组矩形构成,图4所示便是几种Haar特征,是非矩形内像素的灰度加权和是该特征的特征值。积分图表明其图画中恣意一点,都是原始图画中行号和列号均小于该点的像素点像素值之和。使用积分图可以快速核算矩形的灰度和,即Sum=P1 +P4-P2-P3,其间Pi是积分图中矩形极点对应的积分值。多个Haar特征组成一个分类器,多个分类器级联可以进步检测精度。
经过对近30000车牌样本的离线练习,本实验室现已得到可以习惯杂乱环境的Adaboost车牌特征(辨认)库,完结的Adboost车牌检测算法在固定环境下摄影车辆图画,车牌定位辨认率可达99%。本次大赛将要点重视车牌Adaboost算法在线检测的FPGA完结。

图1 AdaBoost车牌定位算法框图
(a)
(b)
图2 (a)强分类器结构 (b)Cascade结构图
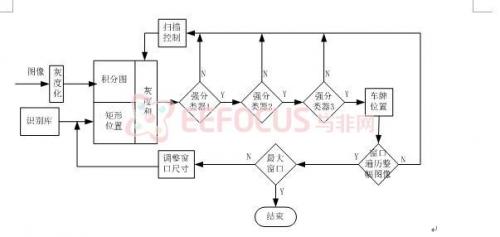
图3 Adboost车牌定位算法流程图
(1) (2) (3)
图4(1)Harr特征 (2)积分图 (3)灰度和
2.2体系作业原理
2.2.1 体系组成
如图5,整个体系由FPGA完结车牌定位算法,合作外围的视频A/D,D/A、存储器等芯片,完结图画的收集和定位符号与原始图画地叠加输出。
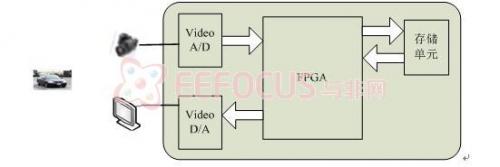
图5 车牌检测体系
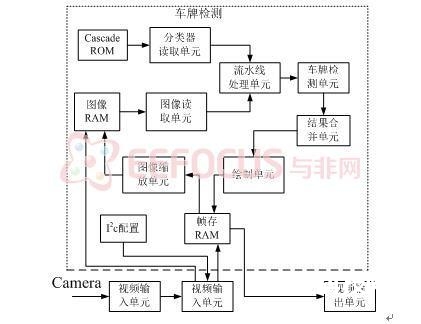
图6 依据FPGA的Adaboost车牌定位计划
2.2.2 体系计划
FPGA完结的Adaboost车牌定位计划如图6所示:
体系内I2C模块经过I2C总线装备A/D芯片的寄存器,使得A/D芯片可以正常作业。
视频输入模块接纳A/D芯片输出的Ycbcr格局的视频数据,解码并提取出图画灰度数据后,将数据存到图画RAM和帧存RAM中。
车牌检测模块开端作业,读取图画RAM中内容,在被检图画中扫描是否包含车牌。车牌检测模块包含图画读取单元,流水线处理单元,分类器读取单元和检测单元。假如检测到车牌,则将车牌信息存储到检测成果兼并单元。
车牌检测模块作业的一起,图画缩放单元担任将存储在帧存RAM中的图画进行缩小,并存储到图画RAM中。
交流处理目标,重复过程3-4直到图画缩小后的巨细与扫描窗口适当。
检测成果兼并单元兼并图画中检测到的重复的车牌,削减冗余的窗口以及误检的车牌。
制作单元读取兼并后的车牌方位和巨细信息,并在原始图画中相应车牌方位制作矩形标明。
在过程1-7的一起,视频输出模块读取帧存RAM中的图画数据,并以VGA格局输出至D/A芯片,显现到显现器上。
重复以上过程。
2.2.3 功能模块
整个体系担任接纳经过流水线核算得到的特征向量值,并依据这些值以及扫描窗口的平方积分和等信息判别扫描窗口是否包含车牌。
视频输入模块:视频输入单元担任从A/D输出端接纳视频数据,并将其间的有用像素提取出来,并发生正确的像素地址信息,保存到帧存中。
视频输出单元:视频输出单元担任从帧存中读出需求显现的图画,并依照VGA格局输出至D/A芯片,终究显现到显现器上。
图画读取单元:图画读取单元担任从帧存中读出扫描窗口,完结列积分和平方积分。
图画缩放单元:使用扫描窗口检测图画时,只能检测到与扫描窗口巨细共同的车牌。图画缩放单元用于将图画缩小,使得相同巨细的扫描窗口可以检测原图画中大于扫描窗口的窗口中是否含有车牌。
制作单元:在原始图画上制作车牌方位信息和车牌号码信息。
流水线处理单元:该流水线包含扫描窗口(存储阵列)及特征向量两条流水线,用于核算特征向量的特征值。
成果兼并单元:车牌检测成果兼并单元的效果便是将车牌区域周围的多个合格扫描窗口兼并为一个,并去除不包含车牌区域的伪扫描窗口。
图画RAM:用来保存从视频收集模块接纳到的图画数据和缩放今后的图画数据。图画RAM有两个写端口和一个读端口,写端口用于向RAM中写入原始图画数据和缩放今后的图画数据;读端口用于向后继处理模块输出图画数据。
帧存RAM:用来保存从视频收集模块接纳到的图画数据、车牌方位信息和车牌号码信息。
Casecade_ROM:用来保存练习得到的Adboost分类器数据(特征向量),包含Haar特征中矩形的方位、巨细、权重、阈值、分类器阈值等信息。
分类器读取单元:它从分类器ROM中读出分类器数据,向扫描窗口流水线供给矩形方位、巨细、权重、阈值、分类器阈值等信息
2.3 技能特色
(1)依据Adboost算法的车牌检测硬件架构规划;
(2)针对640×480五颜六色图画,定位时刻40ms。
(3)固定环境下,车牌定位辨认率99%
3. 技能道路
本规划选用45×15的阵列架构,经过流水线可快速核算矩形灰度和。硬件结构如图7所示。其间白色45×15个方块表明当时检测窗口的行积分,每个单元寄存的是在当时地点的行中该像素点之前的像素值之和。横线填充的方块寄存的是矩形方位数据和权重,竖线填充的方块寄存的是部分灰度和,这两部分构成的特征矢量流水线每时钟周期活动一次,而行积分阵列(白色方块)构成的流水线仅在当时窗口检测结束活动一次,载入新的被检数据。图画数据和分类器数据别离保存在图画RAM和分类器ROM傍边。行积分逻辑由一个加法器和45个寄存器构成,每45个时钟周期核算出一行像素的行积分,并输出到检测阵列。分类器检测逻辑接纳上一级核算出的矩形灰度和,核算其特征值和类似度,并累加一切的类似度,并与阈值进行比较,判别是否经过该级分类器。扫描操控逻辑生成图画RAM的读地址,操控检测窗口对当时图画进行扫描,扫描结束后,将当时图画巨细乘以3/4,从头扫描,直到被检图画与检测窗口巨细共同,则完结一幅图画的检测。
图7 依据Adboost的车牌检测并行算法的架构
更多关于智能交通的技能资讯,欢迎拜访 与非网智能交通技能专区






