


一、工业机器人操控体系所要到达的功用
机器人操控体系是机器人的重要组成部分,用于对操作机的操控,以完结特定的作业使命,其基本功用如下:
1、回忆功用:存储作业次序、运动途径、运动方法、运动速度和与出产工艺有关的信息。
2、示教功用:离线编程,在线示教,直接示教。在线示教包含示教盒和扶引示教两种。
3、与外围设备联络功用:输入和输出接口、通讯接口、网络接口、同步接口。
4、坐标设置功用:有关节、肯定、东西、用户自界说四种坐标系。
5、人机接口:示教盒、操作面板、显示屏。
6、传感器接口:方位检测、视觉、触觉、力觉等。
7、方位伺服功用:机器人多轴联动、运动操控、速度和加速度操控、动态补偿等。
8、毛病确诊安全维护功用:运行时体系状况监督、毛病状况下的安全维护和毛病自确诊。
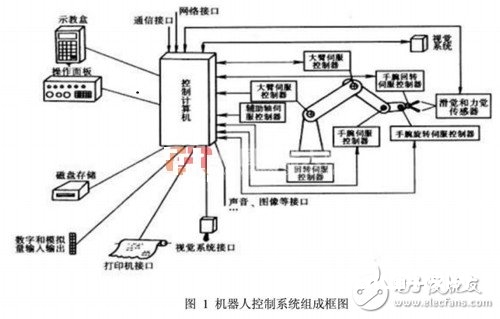
二、工业机器人操控体系的组成
1、操控核算机:操控体系的调度指挥机构。一般为微型机、微处理器有32位、64位等 如飞跃系列CPU以及其他类型CPU。
2、示教盒:示教机器人的作业轨道和参数设定,以及一切人机交互操作,具有自己独立的CPU以及存储单元,与主核算机之间以串行通讯方法完结信息交互。
3、操作面板:由各种操作按键、状况指示灯构成,只完结基本功用操作。
4、硬盘和软盘存贮存:储机器人作业程序的外围存储器。
5、数字和模仿量输入输出:各种状况和操控指令的输入或输出。
6、打印机接口:记载需求输出的各种信息。
7、传感器接口:用于信息的主动检测,完结机器人和婉操控,一般为力觉、触觉和视觉传感器。
8、轴操控器:完结机器人各关节方位、速度和加速度操控。
9、辅佐设备操控:用于和机器人合作的辅佐设备操控,如手爪变位器等。
10、通讯接口:完结机器人和其他设备的信息交流,一般有串行接口、并行接口等。
11、网络接口
1)Ethernet接口:可经过以太网完结数台或单台机器人的直接PC通讯,数据传输速率高达10Mbit/s,可直接在PC上用windows库函数进行应用程序编程之后,支撑TCP/IP通讯协议,经过Ethernet接口将数据及程序装入各个机器人操控器中。
2)Fieldbus接口:支撑多种盛行的现场总线规范,如Devicenet、ABRemoteI/O、Interbus-s、profibus-DP、M-NET等。
三、工业机器人操控体系分类
1、程序操控体系:给每一个自由度施加必定规则的操控效果,机器人就可完结要求的空间轨道。
2、自适应操控体系:当外界条件变化时,为确保所要求的质量或为了跟着经历的堆集而自行改进操控质量,其进程是依据操作机的状况和伺服差错的调查,再调整非线性模型的参数,一直到差错消失停止。这种体系的结构和参数能随时刻和条件主动改动。
3、人工智能体系:事前无法编制运动程序,而是要求在运动进程中依据所取得的周围状况信息,实时确认操控效果。
4、点位式:要求机器人准确操控结尾履行器的位姿,而与途径无关。?
5、轨道式:要求机器人按示教的轨道和速度运动。
6、操控总线:国际规范总线操控体系。选用国际规范总线作为操控体系的操控总线,如VME、MULTI-bus、STD-bus、PC-bus。
7、自界说总线操控体系:由出产厂家自行界说运用的总线作为操控体系总线。
8、编程方法:物理设置编程体系。由操作者设置固定的限位开关,完结起动,泊车的程序操作,只能用于简略的捡起和放置作业。
9、在线编程:经过人的示教来完结操作信息的回忆进程编程方法,包含直接示教模仿示教和示教盒示教。
10、离线编程:不对实践作业的机器人直接示教,而是脱离实践作业环境,示教程序,经过运用高档机器人,编程言语,远程式离线生成机器人作业轨道。
四、机器人操控体系结构
机器人操控体系按其操控方法可分为三类。
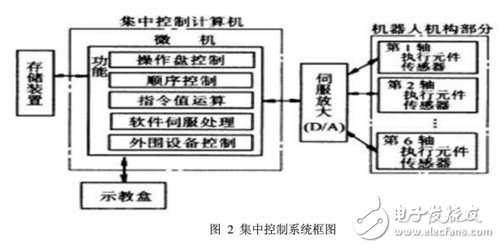
1)会集操控体系(CentralizedControlSystem):用一台核算机完结悉数操控功用,结构简略,本钱低,但实时性差,难以扩展,在前期的机器人中常选用这种结构,其构成框图,如图2所示。依据PC的会集操控体系里,充分利用了PC资源敞开性的特色,能够完结很好的敞开性:多种操控卡,传感器设备等都能够经过规范PCI插槽或经过规范串口、并口集成到操控体系中。会集式操控体系的长处是:硬件本钱较低,便于信息的收集和剖析,易于完结体系的最优操控,整体性与和谐性较好,依据PC的体系硬件扩展较为便利。其缺陷也清楚明了:体系操控缺少灵活性,操控风险简单会集,一旦呈现毛病,其影响面广,后果严重;因为工业机器人的实时性要求很高,当体系进行很多数据核算,会下降体系实时性,体系对多使命的呼应才能也会与体系的实时性相抵触;此外,体系连线杂乱,会下降体系的可靠性。
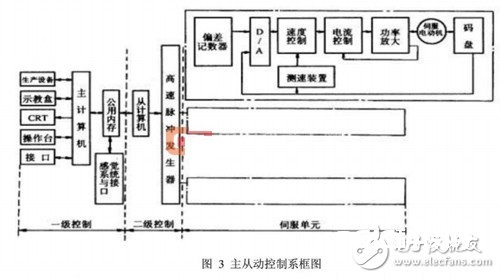
2)主从操控体系:选用主、从两级处理器完结体系的悉数操控功用。主CPU完结办理、坐标改换、轨道生成和体系自确诊等:从CPU完结一切关节的动作操控。其构成框图,如图3所示。主从操控方法体系实时性较好,适于高精度、高速度操控,但其体系扩展性较差,修理困难。
3)涣散操控体系(DistributeControlSystem):按体系的性质和方法将体系操控分红几个模块,每一个模块各有不同的操控使命和操控战略,各方式之间能够是主从联系,也能够是相等联系。这种方法实时性好,易于完结高速、高精度操控,易于扩展,可完结智能操控,是现在盛行的方法,其操控框图如图4所示。其主要思维是“涣散操控,会集办理”,即体系对其总体目标和使命能够进行概括协谐和分配,并经过子体系的和谐作业来完结操控使命,整个体系在功用、逻辑和物理等方面都是涣散的,所以DCS体系又称为集散操控体系或涣散操控体系。这种结构中,子体系是由操控器和不同被控目标或设备构成的,各个子体系之间经过网络等彼此通讯。散布式操控结构供给了一个敞开、实时、准确的机器人操控体系。散布式体系中常选用两级操控方法。
两级散布式操控体系?一般由上位机、下为机和网络组成。上位机能够进行不同的轨道规划和操控算法,下位机进行插补细分、操控优化等的研讨和完结。上位机和下位机经过通讯总线彼此和谐作业,这儿的通讯总线能够是RS-232、RS-485、EEE-488以及USB总线等方式。现在,以太网和现场总线技能的发展为机器人供给了更快速、安稳、有用的通讯服务。尤其是现场总线,它应用于出产现场、在微机化丈量操控设备之间完结双向多结点数字通讯,然后形成了新式的网络集成式全散布操控体系—现场总线操控体系 FCS(FiledbusControlSystem)。在工厂出产网络中,将能够经过现场总线衔接的设备统称为“现场设备/外表”。从体系论的视点来说,工业机器人作为工厂的出产设备之一,也能够概括为现场设备。在机器人体系中引进现场总线技能后,更有利于机器人在工业出产环境中的集成。

散布式操控体系的长处在于:体系灵活性好,操控体系的风险性下降,选用多处理器的涣散操控,有利于体系功用的并行履行,进步体系的处理功率,缩短呼应时刻。
关于具有多自由度的工业机器人而言,会集操控对各个操控轴之间的藕合联系处理得很好,能够很简略的进行补偿。可是,当轴的数量增加到使操控算法变得很杂乱时,其操控功能会恶化。并且,当体系中轴的数量或操控算法变得很杂乱时,可能会导致体系的从头规划。与之比较,散布式结构的每一个运动轴都由一个操控器处理,这意味着,体系有较少的轴间祸合和较高的体系重构性。





