




ZigBee智能家居设备被黑?先看ZigBee联盟回应- 前不久,在拉斯维加斯的2015黑帽子大会上,Cognosec 公司发布了一篇论文,指出在 ZigBee 协议实施方法中的一个缺陷。该公司称该缺

Linux下的驱动程序也没有听上去的那么难实现,我们可以看一下helloworld这个例子就完全可以了解它的编写的方式!我们还是先看一个这个例子,helloworld
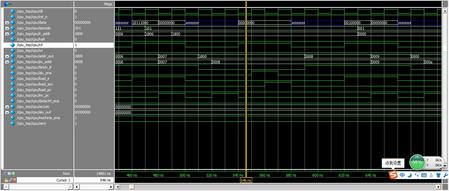
进入波形仿真后点击运行按钮即可出波形,下面我们来验证我们的cpu代码是否正确大家先看两个图,等会小墨同学会结合这两个图给大家细细讲解仿真过程

机器人阻抗控制概念-先看前辈给的定义,“阻抗控制不直接控制机械臂末端与环境接触力,通过分析‘机械臂末端与环境之间的动态关系‘,将力控制和位置控制综合起来考虑,用相同的策略实现力控制和位置控制。”

