




近日,ARM工业控制企业米尔科技推出基于飞思卡尔芯片开发板:MYD-IMX28X开发板。该款开发板含MYD-IMX283和MYD-IMX287两个型号,分别基于飞思卡尔i.MX283和i.MX


两位 Power.org 成员达成协议,提供四个e200 核心系列用于片上系统和特定应用设计加州圣何塞(嵌入式系统大会)讯-2007年4月2日-飞思卡尔半导体扩展了Power

结合45 纳米技术、片上结构和增强型Power Architecture内核,飞思卡尔引领嵌入式多内核半导体设计佛罗里达州奥兰多(飞思卡尔技术论坛)-2007年5月25日-飞思
全球领先的设备软件优化(DSO)厂商风河系统公司(Wind River)与飞思卡尔半导体(Freescale)日前共同推出全新的enablement平台,以满足嵌入式市场不断增长的发
飞思卡尔与SofTec Microsystems日前宣布,正式成为策略性的合作伙伴,客户现可于DevToolDirect及飞思卡尔全球的分销渠道选购SofTec Microsystems的产品。S
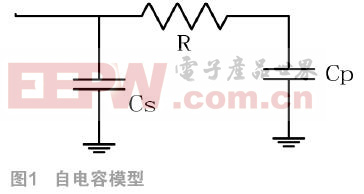
电容触摸屏在数据采集过程中不可避免地会产生系统噪声,为了提高触摸屏坐标定位的精确度,在对原始数据进行定位分析前,首先采用卡尔曼滤波方法对数据进行处理,再将数据在MATLAB中用定位算法计算出触摸屏的坐
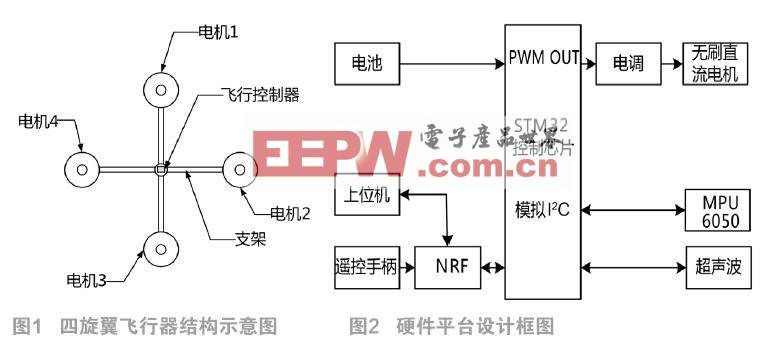
本文基于四旋翼飞行器的工作原理和性能特点,给出了飞行器控制系统设计方案,进行了姿态和高度数据采集的软件设计,并基于卡尔曼滤波算法完成了传感器数据融合,设计了PID控制器并完成了软件实现。实验结果表明,
概述: 加速度传感器用于检测倾斜、运动、定位、振动和撞击力下产生的变化。对那些需要以小型封装结构满足快速响应、高灵敏度、低电流消耗、低电压操作和待机模式的消费电子客户来说飞思卡尔加速度传感器是理想的
