


针对智能汽车竞赛中的电磁组参赛要求,提出了两轮自平衡智能车系统的设计方案。主控芯片采用飞思卡尔公司的MC9S12XS128,选用加速度传感器检测车模的倾角,陀螺仪检测车模的角加速度;通过控制两个电机的
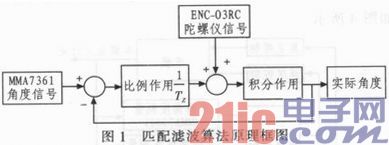
摘要:笔者以飞思卡尔16位单片机MC9S12XS128为核心控制器,以二轮玩具车为控制对象,使用ENC-03RC陀螺仪传感器与MMA7361加速度传感器,通过使用匹配滤波算法实现二轮玩具车模倾斜角度的
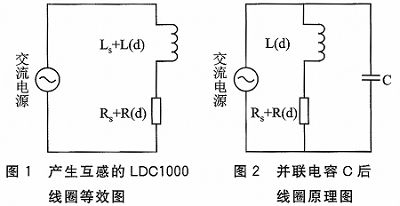
摘要:本文以LDC1000电感传感器以及飞思卡尔Kinetis系列微控制器K60为核心,组成具有定位功能的金属探测系统。通过金属的涡流效应对金属物体进行检测,能够在一定范围内迅速定位出金属物体的精确位
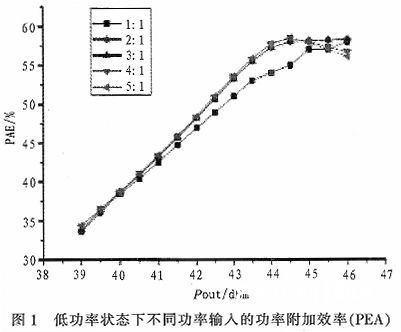
摘要:为在高线性的前提下提高LTE基站系统中的功率放大器效率,基于ADS软件设计了一款工作频段2.5~2.7GHz不对称功率输入的Doherty功率放大器。采用飞思卡尔公司的MRF6S27015N
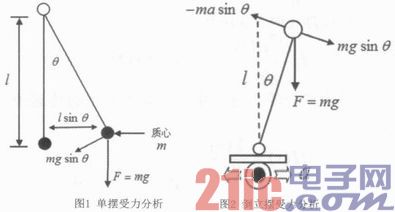
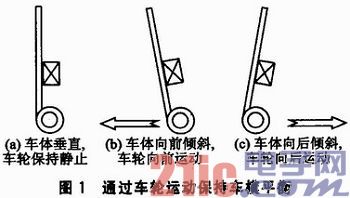
摘要:两轮自平衡智能车要求车模两轮驱动实现其直立行走。直立车的硬件设计和软件设计与四轮车相比更加复杂,在“飞思卡尔”杯全国大学生智能汽车竞赛中,直立车故障多,近一半的参赛队伍完
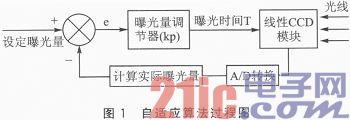
摘要:本设计以第八届“飞思卡尔”杯全国大学生智能车竞赛为背景,提出了一种根据线性CCD采集图像引导直立小车循迹行驶的方案。本文介绍了这一方案的基本思想,所依据的物理原理,并重点
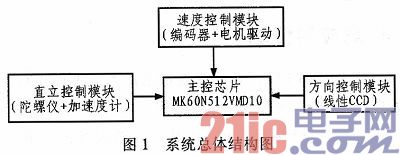
近年来,随着技术的不断进步,两轮自平衡小车以其结构简单、轻盈小巧、运动灵活、高效节能等特点,在许多个领域得到了较大的发展。本文设计并制作了一台两轮小车,用飞思卡尔公司生产的MK60DN512ZVLQ1

作为汽车半导体的领军企业飞思卡尔联合Khronos Group 推出了一款集成了OpenVG硬件加速器的汽车多媒体嵌入式微处理器i.MX35,成为全球首款集成OpenVG硬件


1 引言智能小车寻迹系统是基于摄像头和飞思卡尔16微处理器mc9s12xs128组成,由摄像头采集图像有用信息送入单片机分析道路参数。智能小车跑道表面为白色,中心有连续黑线作为引导线,黑线宽25mm,
