




这两天在移植u-boot,花了两天完全是因为卡在nandflash里了,关于nandflash下次再写吧,这次记录一下刚刚遇到的一个问题吧。。。呵呵。


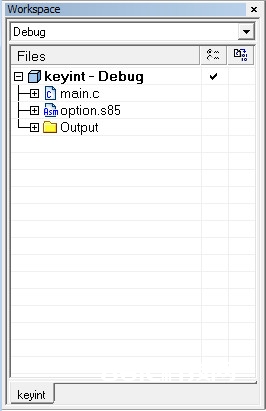
编译环境:IARForV8503.81+MiniCube2硬件环境:D70F3630(D70F3377A)在开始时,遇到了很多问题。主要是因为对硬件结构的不…
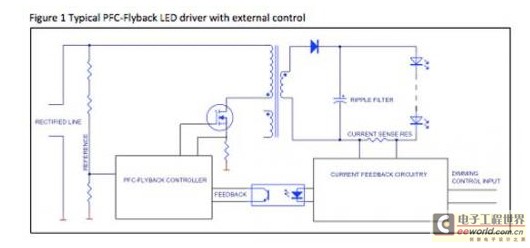
本文不讨论双向晶闸管的变光技术,因为低光量不稳定性是因为不同的机制造成的,使用通信技术设定LED电流的变光方法包括DALI、0-10V、Zigbee和电力线载波控制。LED驱动器端收到一个信号,并用其
