




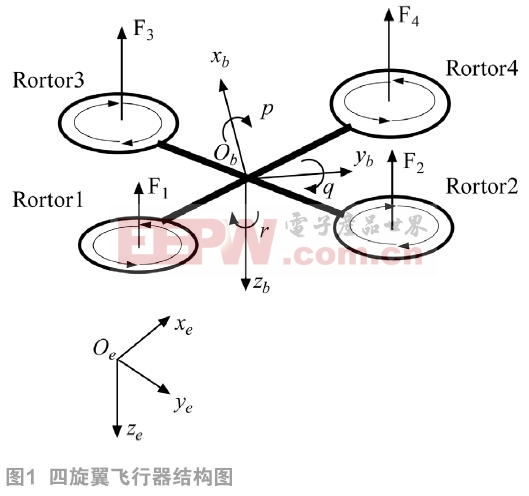
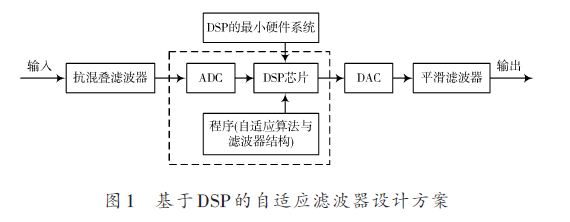
针对在参数变化、外部干扰条件下四旋翼飞行器的稳定飞行控制问题,本文提出了一种基于反步法的四旋翼飞行器增稳控制方法。首先,建立四旋翼飞行器的动态模型。其次,基于反步法设计的控制器用于飞行器姿态控制,采用
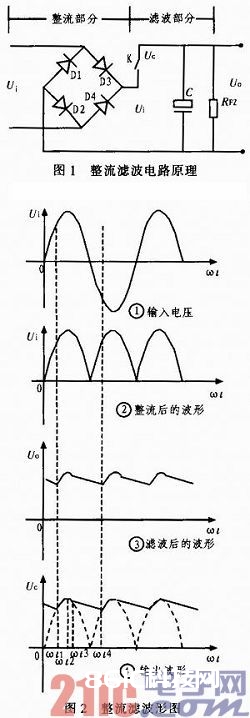
摘要:整流滤波电路是直流稳压电源设备中常用电路,其中滤波电容的设计选取,直接影响到纹波电压的大小,关系到输出直流电压的质量。本文通过在设定条件下,依据整流滤波电路原理,阐述了纹渡电压产生的过程,给出了
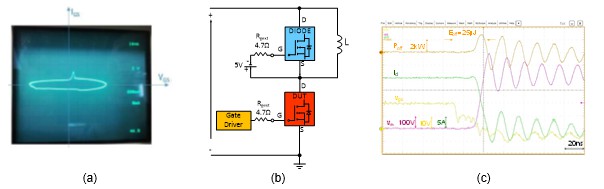
本文的目的是分析碳化硅MOSFET的短路实验(SCT)表现。具体而言,该实验的重点是在不同条件下进行专门的实验室测量,并借助一个稳健的有限元法物理模型来证实和比较测量值,对短路行为的动态变化进行深度评
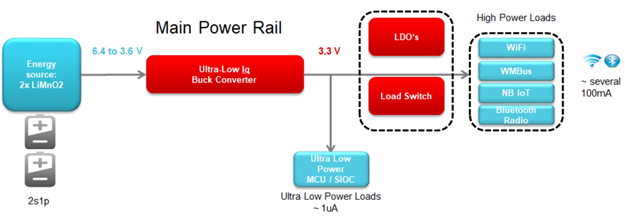
许多电池供电的应用需要降压转换器才能在100%占空比条件下工作,其中VIN接近VOUT,以便在电池电压达到最低值时延长电池续航时间。例如,假设有两节锂-二氧化锰(Li-MnO2)电池为智能电表供电。L
